
Pierwszym zastosowaniem dronów w geodezji jest wykonanie ortofotomapy, na podstawie której można wektoryzować obiekty fotografowane na zdjęciach.
Inna formą reprezentacji danych, jakie możemy pozyskać z nalotu, jest chmura punktów. Na jej podstawie można wykonywać obliczenia powierzchni, objętości itp.
Dzięki szybkiemu pomiarowi (nalot trwa kilka, kilkanaście minut) można także dokumentować stan obiektu podczas jego ciągłej eksploatacji.
Ponadto, dane z drona można wykorzystać do:
- wykonywania wywiadu terenowego,
- aktualizacji mapy do celów projektowych,
- wykonywania ortofotomapy,
- dokumentacji miejsca pracy (informacja o tym co w dniu pomiaru było wykonane, a co nie),
- uzupełnienia pomiaru o elementy, które zostały pominięte podczas pomiaru w terenie,
- zastąpienia szkicu polowego zdjęciami,
- zdalnego przeprowadzenia analizy przebiegu granic (pokrycie się miedz, płotów z danymi z ewidencji),
- obliczania objętości hałd/nasypów,
- kontroli w czasie postępu prac na budowie/kopalni,
- tworzenia modeli terenu potrzebnych do późniejszego projektowania nowych inwestycji w trójwymiarze.
Wszystkie te zadania możemy wykonywać różnymi rodzajami dronów; w zależności od funduszy, jakimi dysponujemy, specyfiką prac, czy wielością robót. Naszą pełną ofertę w tym zakresie znajdziesz TUTAJ.
Poniżej prezentuję natomiast przykłady, które wykonane zostały najbardziej podstawowym modelem z naszej oferty: Yuneec Typhoon h520, który – przy minimalnym stopniu inwestycji i dużej funkcjonalności – stanowi idealne narzędzie do rozpoczęcia przygody z dronami w geodezji.
Zacznijmy od aplikacji, która wygląda tak:
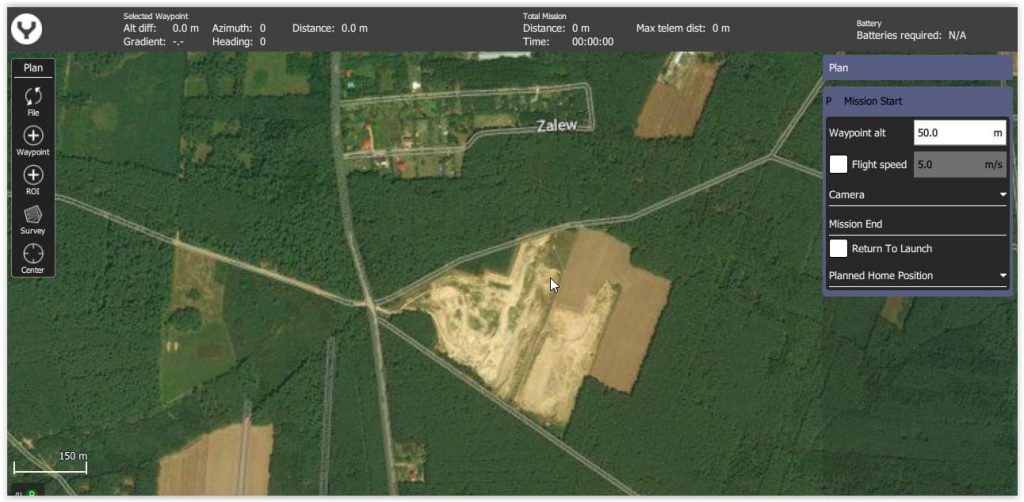
Służy ona do planowania różnego rodzaju misji autonomicznych, z których najczęściej wykorzystywaną jest nalot ze zdjęciami pionowymi nad określonym obszarem.
Podczas planowania nalotu definiuje się podstawowe parametry lotu tj. wysokość lotu (lub wielkość terenową piksela) pokrycie podłużne i poprzeczne zdjęć oraz kierunek lotu drona:
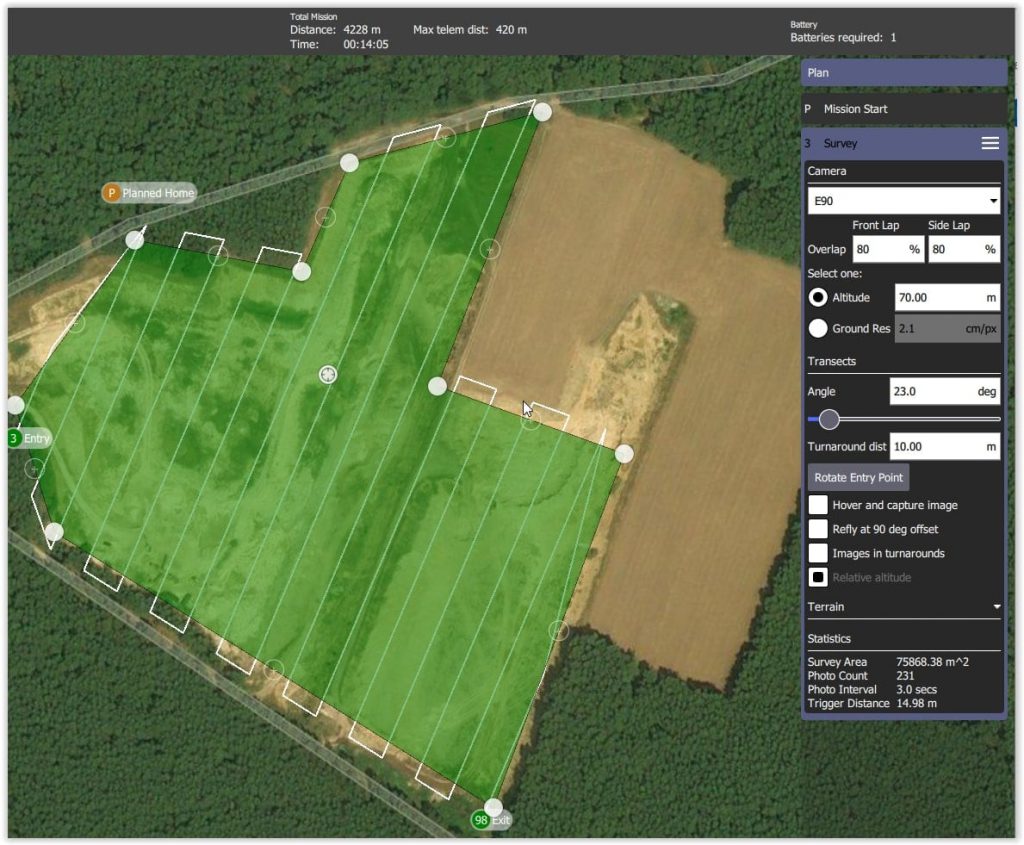
Co warto odnotować – w przypadku lotu kopterem oraz nowszymi skrzydłami, nie jest już wymagane latanie prostopadle do kierunku wiatru.

Poniżej widzimy przykładowe rozdzielczości zdjęcia z kamery E90 w zależności od wysokości lotu:
| Wysokość lotu | Piksel terenowy |
| 50 | 1.5 cm |
| 70 | 2.1 cm |
| 110 | 3.2 cm |
| 150 | 4.4 cm |
Dane z nalotu można opracować dowolnym programem, który umożliwia pracę z danymi fotogrametrycznymi, takimi jak Trimble Business Centre (UAS Master), Agisoft Metashape czy Pix4D.
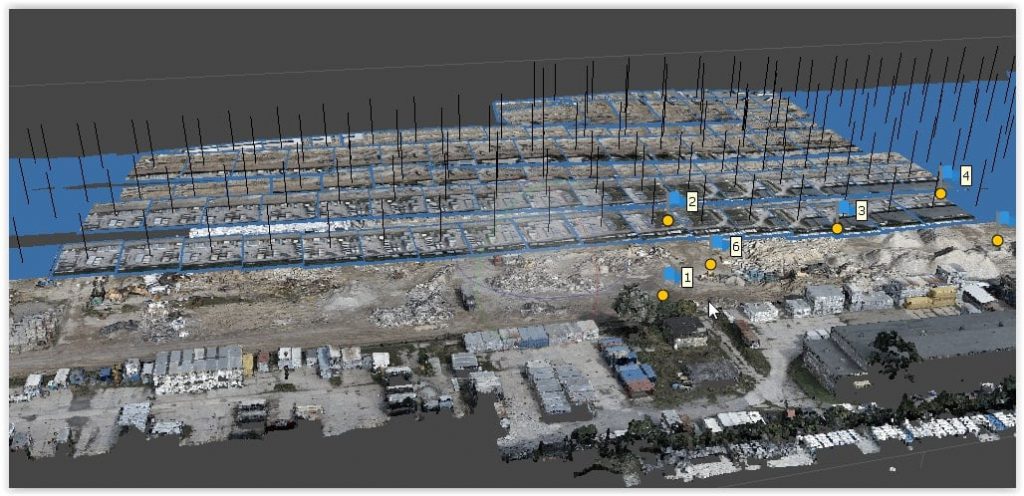
Po wykonaniu orientacji zewnętrznej, powstaje blok zdjęć ściśle ze sobą powiązanych. Dokładność takiego dopasowania jest na poziomie 1 piksela:
Kiedy potrzebujemy pracować w układzie geodezyjnym, do rejestracji naszego bloku zdjęć musimy wykorzystać fotopunkty – nawet, jeżeli dron jest wyposażony w moduł RTK. Służą one bowiem później do kontroli dokładności poprawnego rozwiązania w RTK.
Fotopunkty dzielimy na dwa rodzaje. Punkty wykorzystywane do obliczeń (transformacji bloku zdjęć z układu, w jakim lata dron, do układu, w jakim chcemy pracować) oraz na punkty, które służą do kontroli wykonanej transformacji.

Ilość fotopunktów na terenie nalotu zależy od wielu czynników. Od obszaru (co, jak sądzę, dość oczywiste), po różnice w deniwelacji terenu.
Dlatego na pytanie: „ile fotopunktów muszę założyć na 1 ha opracowania?” bardzo trudno odpowiedzieć, bo jest wiele czynników, które ilość tych punktów mogą zmienić. Warto natomiast pamiętać, że fotopunkty powinny znajdować się na obrzeżach interesującego nas obiektu.

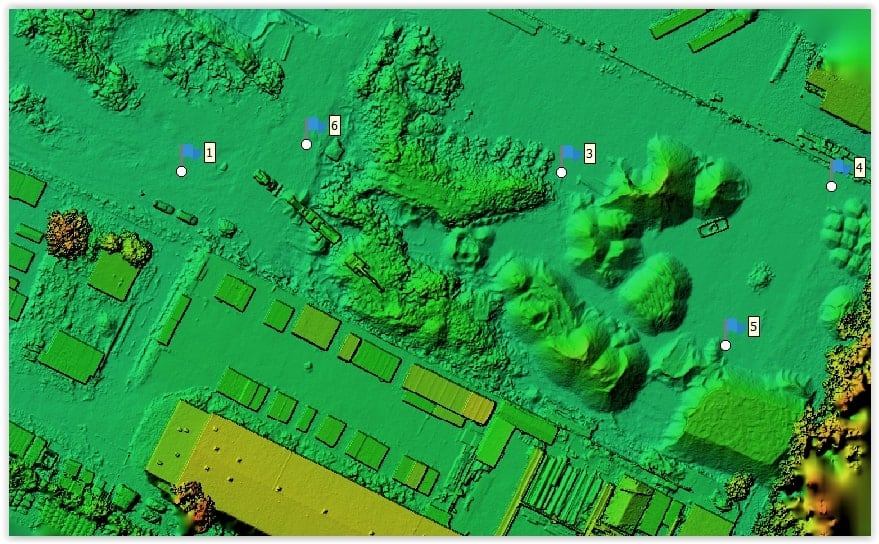
Po wykonaniu orientacji zewnętrznej można wygenerować chmurę punktów, której gęstość zależy od parametru obliczeń oraz od dokładności zdjęć (wielkość piksela terenowego).
Chmurę punktów można wykorzystać do obliczenia objętości nasypów/wykopów, czy sczytywania współrzędnych 3D szczegółów terenowych. Na podstawie chmury punktów tworzony jest również Numeryczny Model Pokrycia Terenu.
Do celów fotogrametrycznych warto usunąć z chmury punktów takie obiekty jak budynki, czy wysoką roślinność. Wówczas ortofotomapa będzie lepszej jakości.
Poniżej przedstawiłem ortofotomapę wykonaną na podstawie NMPT. Dla terenów mało zabudowanych oraz mało zadrzewionych takie opracowanie jest w zupełności wystarczające. Na terenie zurbanizowanym, zalesionym warto wykorzystać Numeryczny Model Terenu, który poprawia jakość danych wynikowych (ortofotomapy).

Ortofotomapa to obraz terenu przetworzony z rzutów środkowych (zdjęć) na rzut ortogonalny. Z ortofotomapy można wektoryzować szczegóły terenowe (tak jak z rastra). Natomiast nie możemy na jej podstawie uzyskać informacji o wysokości danego punktu.
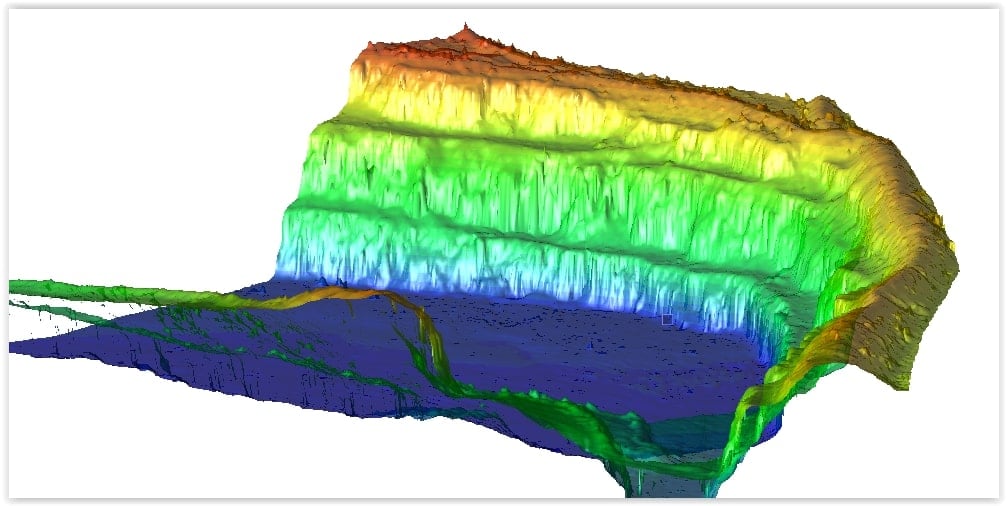
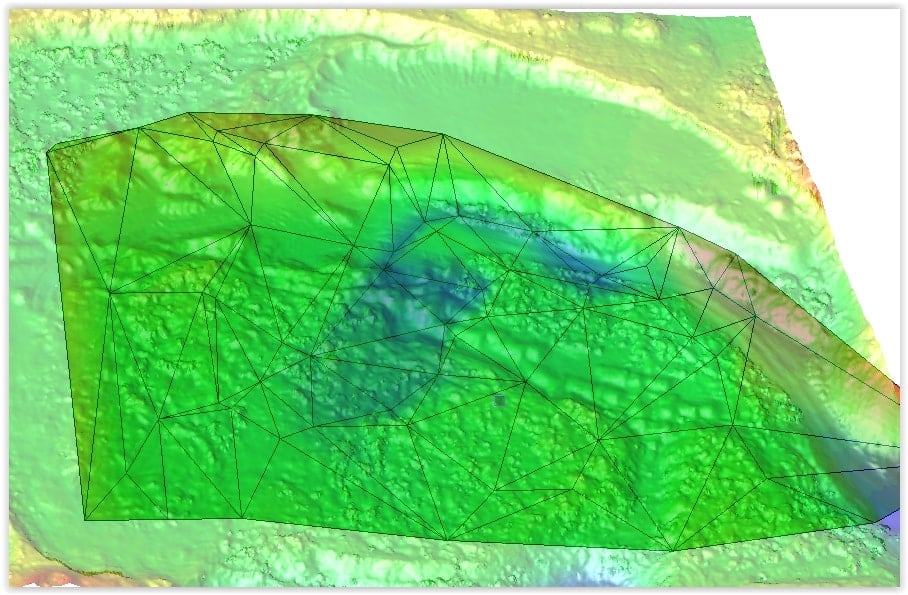
Oto wygląd chmury punktów w programie Trimble Business Center prezentujący fragment kopalni, na której został wykonany wykop:

Po meshowaniu (przetworzeniu chmury na siatkę trójkątów) ten sam fragment wygląda tak:
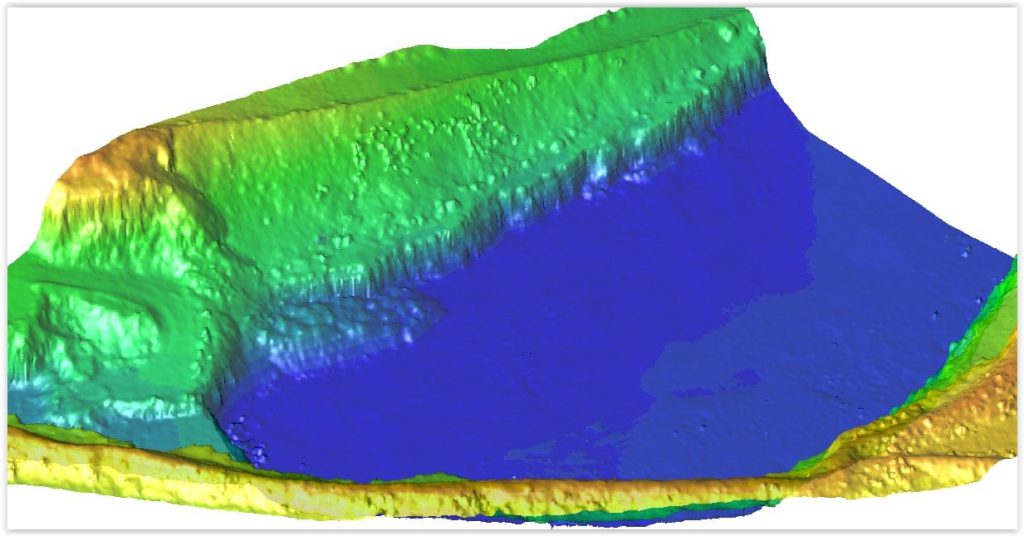
Na podstawie takiej powierzchni można wykonywać obliczenia objętości, powierzchni, analizować płaskość itd. Forma ta jest bardzo podobna do Modelu terenu.
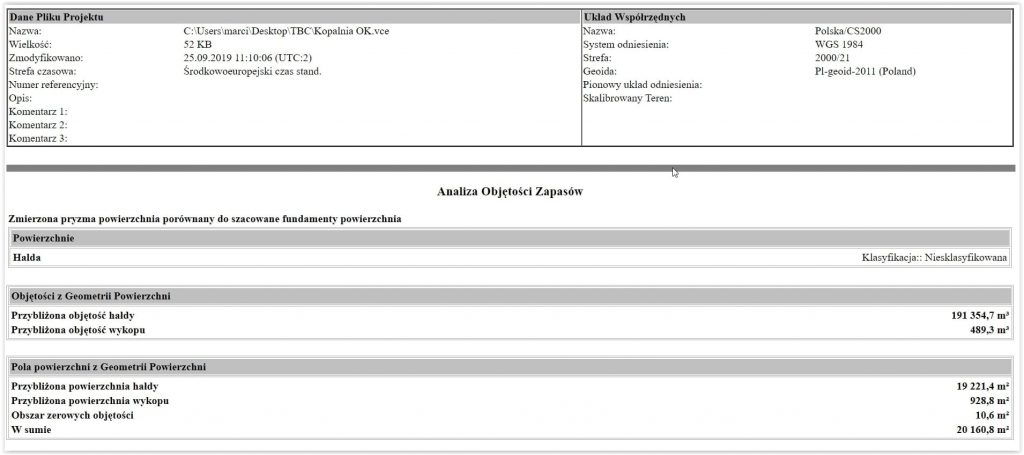
Takie obliczenia możemy błyskawicznie przedstawić w formie gotowego raportu. Wystarczy zdefiniować granice obiektu który nas interesuje, resztę wykona za nas program. W raporcie określone są podstawowe parametry takie jak objętość, powierzchnia, maksymalna wysokość itp.
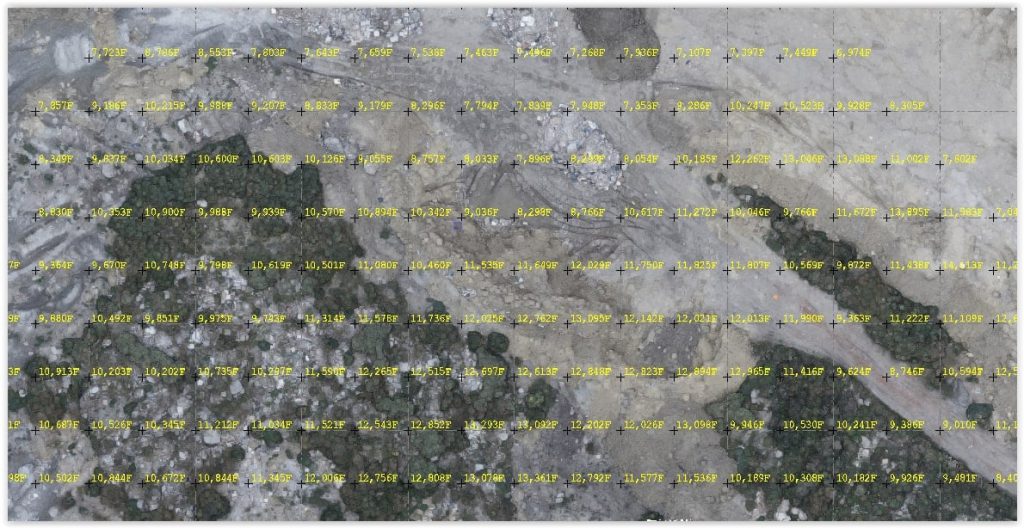
Na powierzchnię utworzoną na podstawie chmury punktów możemy także nałożyć regularną siatkę punktów:
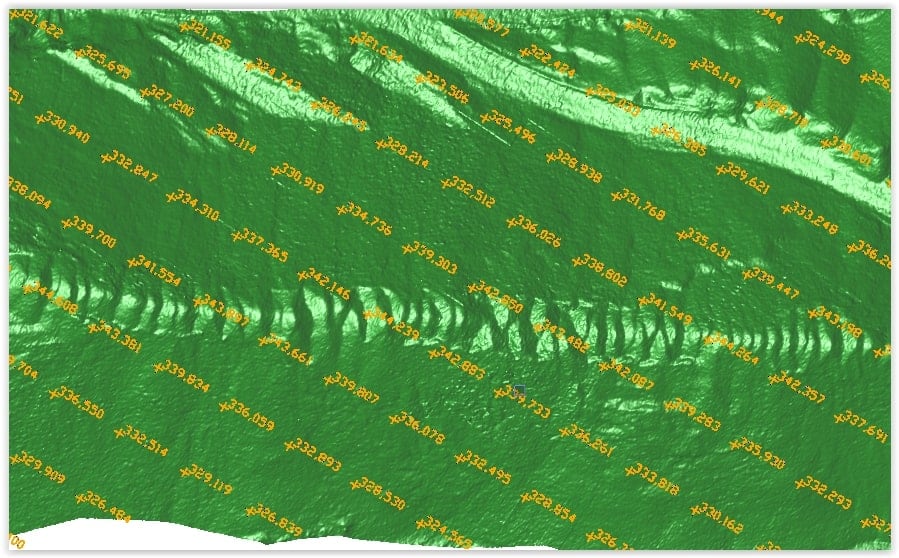
Punkty te mają zdefiniowane współrzędne XYZ, a wyświetlanym opisem jest ich wysokość.
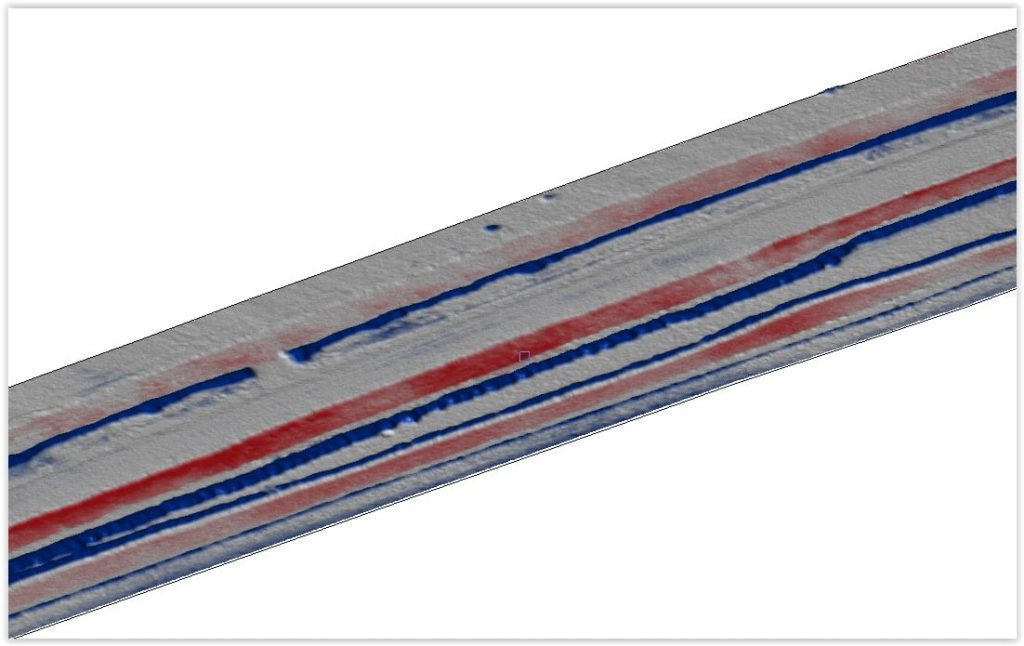
Kolejnym produktem, jaki możemy uzyskać z wykorzystaniem duetu Yuneec Typhoon H520 oraz Trimble Business Center są mapy różnicowe.
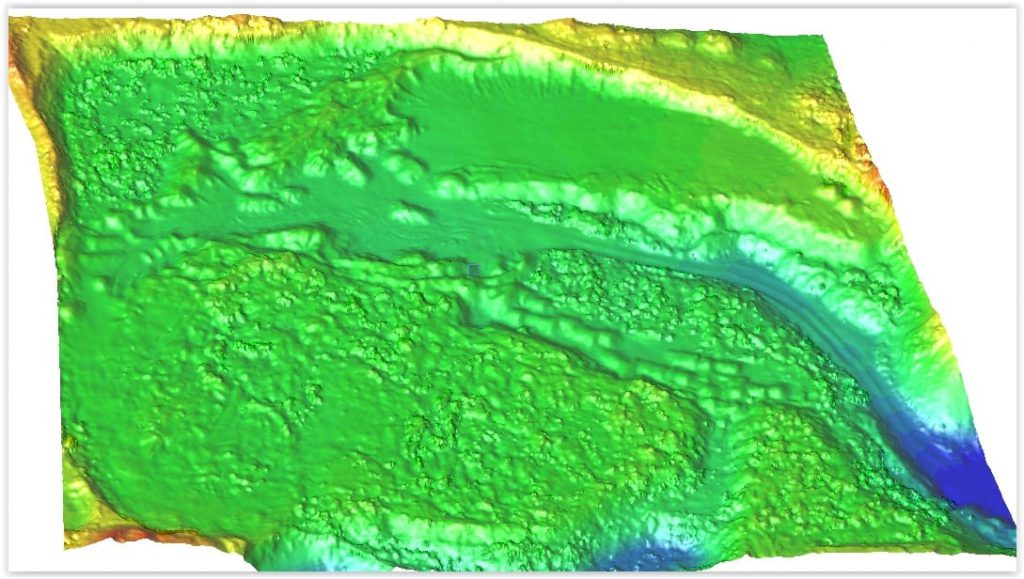
Przyjrzyjmy się modelowi terenu na obszarze wysypiska śmieci częściowo już zasypanego:
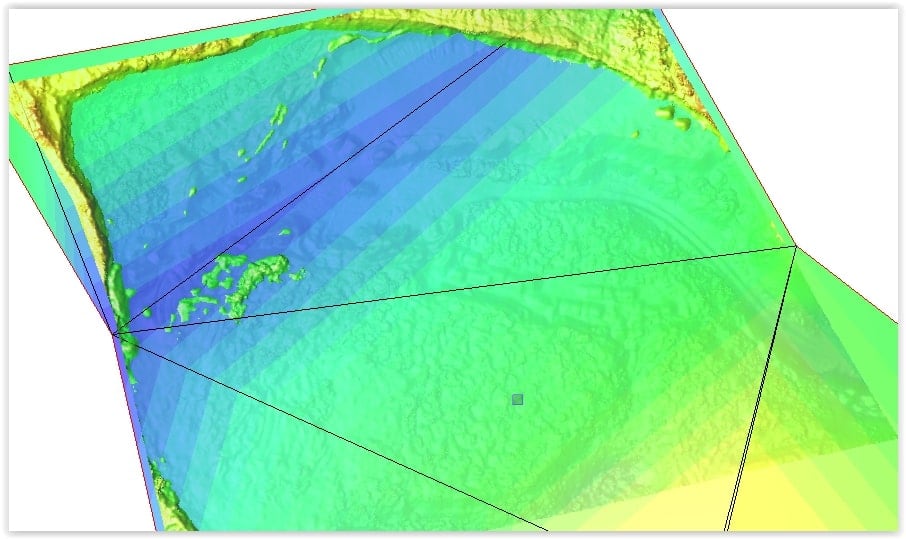
Na powierzchnię z nalotu została nałożona druga powierzchnia, która definiuje poziom, do którego wyrobisko można uzupełniać odpadami. Powierzchnia ta została zdefiniowana na podstawie obwiedni wyrobiska opuszczonej o 2m (warstwa, która ma zostać uzupełniona ziemią):
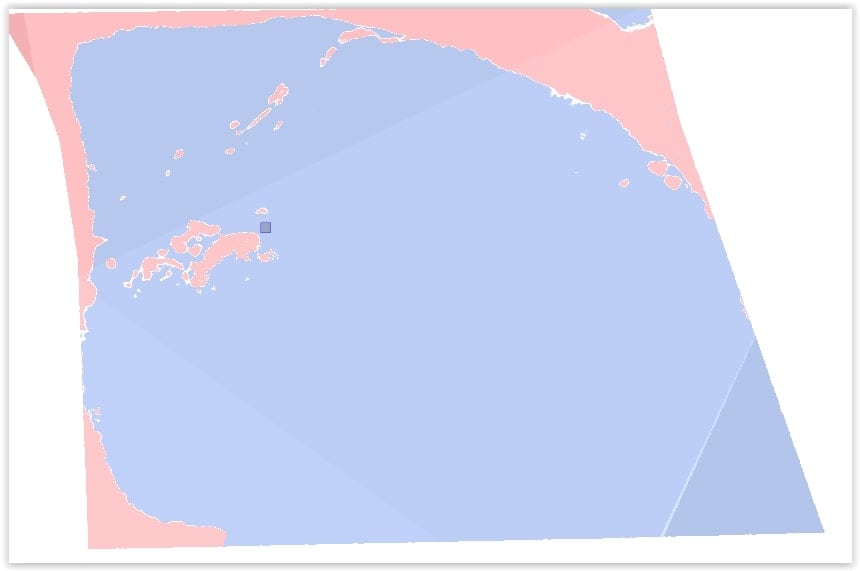
Po porównaniu tak zdefiniowanych płaszczyzn, otrzymać można powierzchnię różnicową, która obrazuje miejsca, gdzie materiału jest już zbyt dużo, a gdzie można go jeszcze dosypywać:
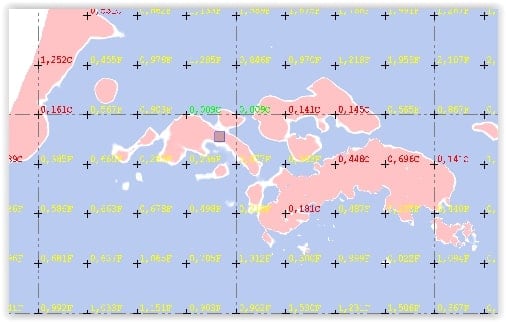
Dodatkowo na taką powierzchnię możemy nałożyć siatkę punktów, które będą informowały nas o wysokościach, jakie należy dosypać, bądź wybrać, w danym miejscu:
Porównajmy teraz dwa analogiczne pomiary – jeden wykonany kilka late wcześniej metodą klasyczną (GPS), drugi – teraźniejszy – z wykorzystaniem drona.
Na poniższym zrzucie ekranu przedstawiono dwa takie pomiary w widoku z boku (na górze nalot, na dole pomiar klasyczny):
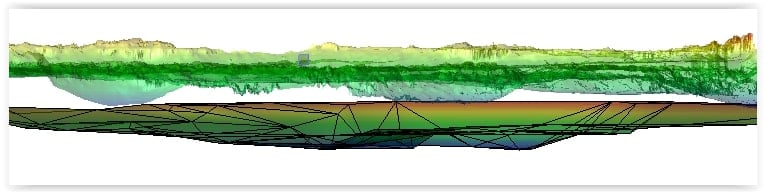
Na pierwszy rzut oka widać, jaka jest dokładność obliczeń dla jednej jak i drugiej powierzchni. Szczegółowość pomiaru geodety jest znacznie mniejsza i nie uwzględnia tylu szczegółów, co dane uzyskane z nalotu.
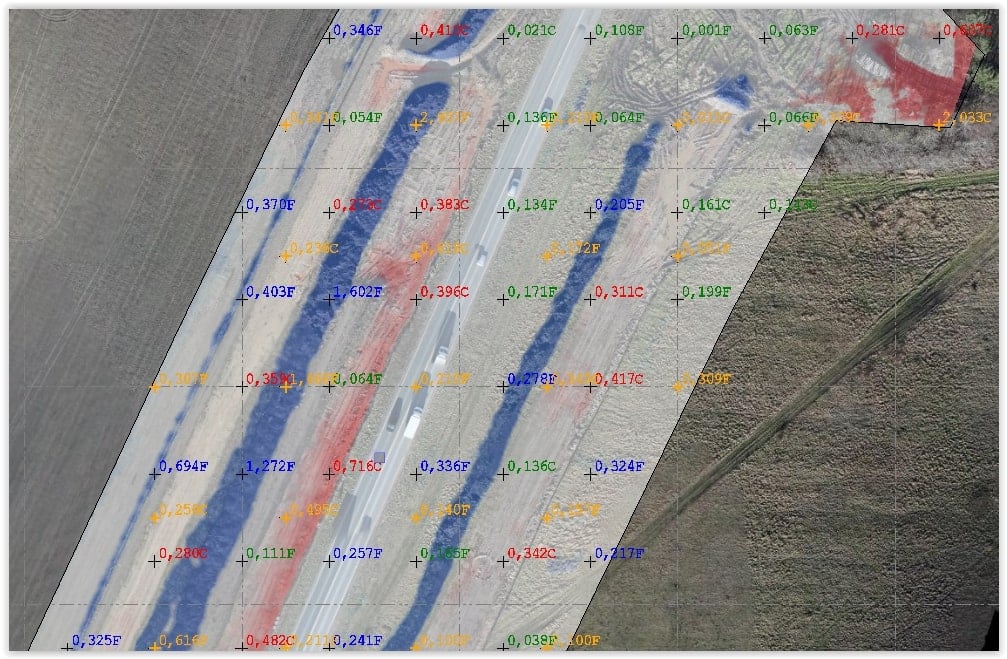
Po wykonaniu porównania tych dwóch powierzchni i obliczeniu siatki punktów, została ona nałożona na ortoobraz kopalni. Dzięki temu można uzyskać informację o tym, ile materiału (odpadów) zostało nasypane w danym miejscu .
Na koniec przyjrzyjmy się jeszcze obiektowi liniowemu, w którego przypadku bardziej efektywne będzie skorzystanie ze „skrzydła” (tutaj Delair UX11):

Mam nadzieję, że te kilka przykładów przekona Cię do tego, że warto zainteresować się fotogrametrią, do czego serdecznie namawiam.
W razie jakichkolwiek pytań, lub chęci zgłębienia tematu – pamiętaj, że zawsze jesteśmy do Twojej dyspozycji!
Marcin Zdzierak, Geotronics Dystrybucja.




antek8435 | 26 sierpnia 2021
Drony to świetne urządzenia! Ja zrobiłem licencję na drona i dziś wykonuję fotografie nie tylko prywatnie, ale również zawodowo przede wszystkim na ślubach. Taki mały sprzęt a daje tyle radości…