
DJI to chiński gigant technologiczny dominujący na rynku dronów konsumenckich. Wielowirnikowiec Phantom 4 RTK to ich odpowiedź na profesjonalne drony pomiarowe. Wingtra jest szwajcarską firma specjalizująca się w produkcji profesjonalnych dronów, która całkowicie skupia się na systemie pionowego startu i lądowania WingtraOne. Poniżej przedstawiamy podsumowanie oraz szczegółowe porównanie tych dronów.
Podsumowanie: Wielowirnikowiec vs. system pionowego startu i lądowania (VTOL)
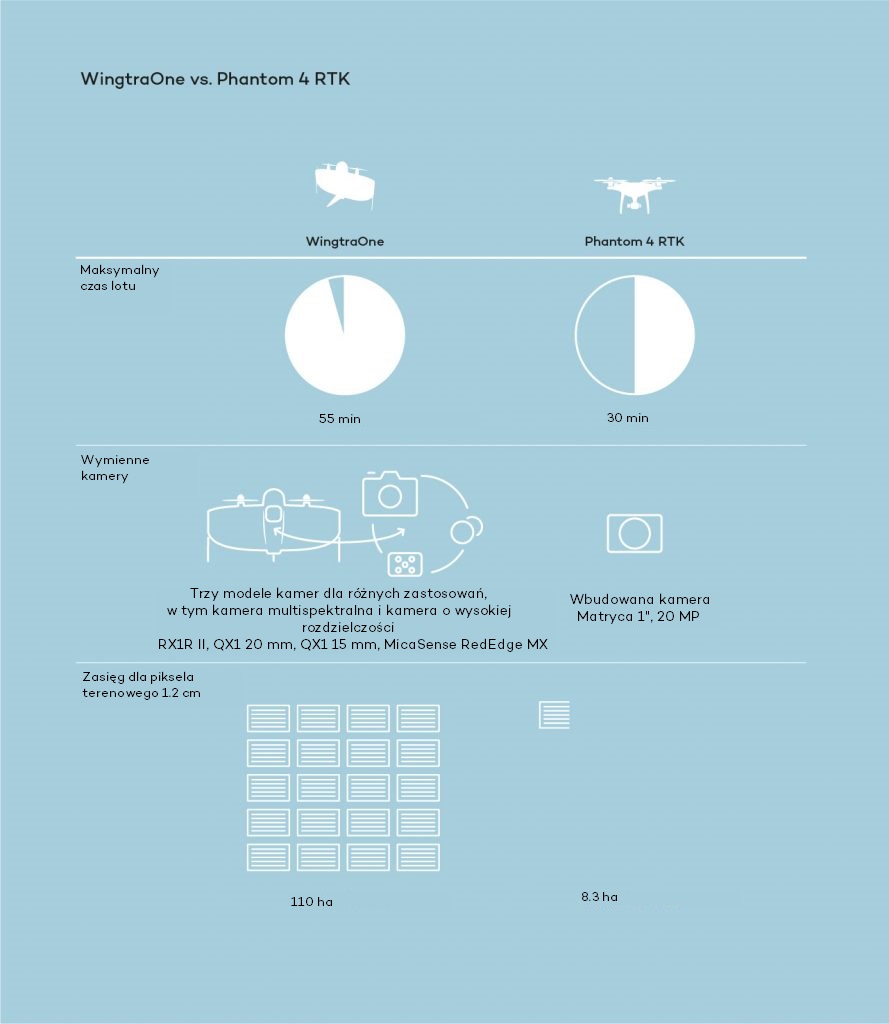
Chociaż oba drony reklamowane są jako drony dla geodetów, WingtraOne i Phantom 4 RTK nie mają zbyt wiele wspólnych cech. Jako dron pionowego startu i lądowania, system WingtraOne jest połączeniem płatowca z wielowirnikowcem. System ten startuje i ląduje pionowo, ale podczas lotu przechodzi w tryb płatowca. Phantom 4 RTK to typowy wielowirnikowiec, który w powietrzu zachowuje się jak helikopter. Ze względu na tę fundamentalną różnicę, WingtraOne zapewnia znacznie szerszy zakres pokrycia wymagany przez większość projektów mapowania, podczas gdy wielowirnikowce takie jak Phantom 4 RTK mogą obejmować tylko ograniczone obszary.
W rzeczywistości, według naszych lotów testujących zasięg, na pełnej baterii WingtraOne może pokryć prawie 14 razy większy obszar niż Phantom 4 RTK przy tym samym pikselu terenowym równym 1.2 cm. Phantom 4 RTK pokrył 8 ha, a WingtraOne 110 ha podczas jednego nalotu.
Zasięg 1 lotu przy pikselu terenowym (GSD) 1.2 cm
Pokrycie: 110 ha
Wysokość: 93 m

Pokrycie: 70 ha
Wysokość: 57 m

Pokrycie: 8 ha
Wysokość: 44 m
Wyniki z naszych testowych lotów przy wielkości piksela terenowego 1.2 cm pokazały, że WingtraOne z kamerą RX1R II ma prawie 14x większy zasięg w porównaniu do wbudowanej kamery DJI Phantom 4 RTK.
Poza zasięgiem, WingtraOne przewyższa Phantom 4 RTK pod względem rozdzielczości obrazu, która później określa również bezwzględne miary dokładności. Dzięki flagowej kamerze Sony RX1R II 42 MP WingtraOne może osiągnąć ponad dwukrotnie wyższą rozdzielczość obrazu niż Phantom 4 RTK. Wyższa rozdzielczość obrazu oznacza lepszą jakość mapowania, która definiuje jakość całego projektu.
Oto porównanie obrazu testowego przy najlepszym możliwym pikselu terenowym dla kamery RX1R II WingtraOne i wbudowanej kamery Phantom 4 RTK:

WingtraOne + Sony RX1R II
Piksel terenowy (GSD): 0.8 cm
Wysokość: 65 m
Prawdziwa rozdzielczość: 0.9 cm
Pokrycie: 110 ha

Phantom 4 RTK
Piksel terenowy (GSD): 1.8 cm*
Wysokość: 65 m (213 ft)
Prawdziwa rozdzielczość: 2.4 cm
Pokrycie: 35 ha
Obrazy testowe przy najniższym możliwym pikselu terenowym (GSD) każdego drona. Pełnoklatkowa kamera WingtraOne o rozdzielczości 42MP pozwala uzyskać trzy razy mniejszy piksel terenowy z dobrze widocznymi liniami**. Możesz łatwo porównać te linie, patrząc na środek gwiazd Siemensa, które pokazują stopień jasności lub rozmycia. Więcej obrazów testowych wykonanych na tej samej wysokości i przy takim samym pikselu terenowym znajduje się poniżej w sekcji obrazów testowych. Uwaga: wszystkie dane dotyczące pokrycia w tym raporcie są teoretyczne i obliczone na podstawie podanego zasięgu, o ile nie piszemy że są to wartości sprawdzone (przetestowane).
* Teoretycznie, Phantom 4 RTK byłby w stanie osiągnąć niższy piksel terenowym (GSD), jednak w miejscu, w którym przeprowadzaliśmy testy, środowisko nie pozwoliło nam latać poniżej 65 m, stąd „najlepszy piksel terenowy ” w tej sytuacji wynosi 1.8 cm.
** Prawdziwa rozdzielczość dla wszystkich obrazów opiera się na pomiarach cienkiej linii gwiazdy Siemensa, co zmniejsza błędy pomiaru.
Plusy WingtraOne
- Prawie 14x szerszy zasięg dla tego samego piksela terenowego—pokrycie WingtraOne wyniosło 110 ha a Phantom 4 RTK – 8 ha, przy pikselu terenowym równym 1.2 cm
- Dwa razy dłuższy czas nalotu
- Rozmiar piksela terenowego poniżej centymetra
- Możliwość wymiany kamery na inne modele kamer RGB lub kamerę multispektralną —jeden dron, wiele zastosowań
- Dokładność bezwzględna poniżej 1 cm/px
- Funkcja śledzenia terenu umożliwia mapowanie różnych wysokości z zachowaniem takiego samego piksela terenowego podczas jednego nalotu
- Konstrukcja kompozytowa
- Dobrze widoczny kolor pomarańczowy
Minusy WingraOne
- Większy do transportu—twardy kufer mieści się z tyłu lub w bagażniku małego samochodu.
- Większy koszt przy wyższej jakości obudowie, kamerze i wynikach
- Telemetria nie jest zintegrowana z tabletem stacji naziemnej
Plusy Phantom 4 RTK
- Lekki, łatwy w transporcie
- Widok w czasie rzeczywistym w aplikacji
- Funkcja wykrywania przeszkód pomaga uniknąć kolizji
- Zdalne sterowanie pozycją kamery w locie
- Telemetria zintegrowana ze stacją naziemną
- Dobre sterowanie lotem – przyjazne dla użytkownika
- Odbiornik RTK i dodatkowy moduł GNSS umożliwiają odbieranie poprawek w czasie rzeczywistym w idealnych warunkach
Minusy Phantom 4 RTK
- Połowa czasu lotu i zasięgu jest odpowiednia tylko dla małych projektów (35 ha podczas lotu z pikselem terenowym równym 1.8 cm)
- Matryca 1” 20MP ogranicza rozdzielczość i uniemożliwia wykonanie dobrych zdjęć powyżej 100 m
- Wbudowana kamera RGB i wideo
- Brak funkcji śledzenia terenu
- Opcja RTK jest zależna od kilku sygnałów, które mogą zostać utracone lub zablokowane
Werdykt
Jeśli szukasz utrzymujących się na wysokim poziomie, dobrej jakości zdjęć i wysokiej dokładności przy średnich i dużych projektach obejmujących różne zastosowania, wybierz WingtraOne. Jeśli masz ograniczony budżet i potrzebujesz drona klasy podstawowej dla mniejszych projektów z rozsądną rozdzielczością i dokładnością bezwzględną, warto przyjrzeć się bliżej systemowi Phantom 4 RTK. Jeśli dopiero zaczynasz swoją przygodę z dronami, możesz zrobić to co zrobiło wiele osób i zdecydować się na rozwiązanie dla początkujących, które pozwoli wykonywać podstawowe projekty. Jeśli jednak potrzebujesz rozwiązania, które obejmie większe obszary oraz pozwoli uzyskać obrazy o lepszej jakości, warto zastanowić się nad droższym systemem.
Szczegółowe porównanie WingtraOne vs. Phantom 4 RTK
Poniżej przedstawiamy dogłębną analizę funkcji obu systemów, szczegółowe zdjęcia testowe i najważniejsze specyfikacje.
Kluczowe różnice systemów WingtraOne i Phantom 4 RTK obejmują różne obszary pokrycia, opcje ładunku, jakości kamer, a także wynikowe rozdzielczości i dokładności obrazu.
Transport i obsługa
Kufer Phantom 4 RTK ma rozmiar małej walizki podręcznej. Jest lekki i kompaktowy, przez co łatwo się go transportuje, a ponadto zawiera wszystko czego potrzebujesz do lotu. Mimo że obudowa jest wykonana z pianki, działa całkiem dobrze i ma przyjemny wygląd.
Sztywny pokrowiec WingtraOne mieści się do małego samochodu, a miękki plecak umożliwia łatwe i bezpieczne noszenie systemu przez jedną osobę na plecach praktycznie wszędzie, trzymając kufer z akcesoriami w jednej ręce.

Produkt i jakość
WingtraOne posiada wysokiej jakości konstrukcję z włókna szklanego, która jest wyposażona w wymienne boczne i środkowe podpory. Jako stację naziemną otrzymujesz tablet Samsung Tab Active 2, który przeszedł testy wojskowe dla 21 warunków środowiskowych, w tym temperatury, pyłu, wstrząsów/wibracji i ekstremalnych ciśnień. Oprogramowanie WingtraPilot jest zainstalowane na tablecie. Stacja bazowa zawiera również stację ładowania i dwa zestawy baterii, a także pilot zdalnego sterowania, moduł telemetryczny i anemometr do pomiaru wiatru.
Galeria WingtraOne




Phantom 4 RTK to lekki quadrocopter z doczepianymi śmigłami. W zestawie znajduje się bateria „inteligentnego lotu” i stacja ładowania. Stacja naziemna wyposażona jest w pilota i konsolę telemetryczną ze zintegrowanym tabletem. Ta integracja zapewnia spójny wygląd produktu, a także wygodę ładowania kontrolera i tabletu jednocześnie. Na tablecie domyślnie zainstalowana jest aplikacja GS RTK, która uruchamia się natychmiast po włączeniu urządzenia.




Planowanie i ustawienia nalotu
Początkowo konfiguracja lotu Phantom 4 RTK może nie być tak intuicyjna, jak w przypadku innych tabletów z systemem Android, ponieważ DJI posiada niestandardowe funkcje. Mimo to, po zapoznaniu się z instrukcjami obsługi dostępnymi online, ustawienia stają się jaśniejsze i można prawidłowo je skonfigurować. Aplikacja GS RTK jest uruchamiana automatycznie i poza opcją „tradycyjnego lotu” oferuje dwa tryby planowania – fotogrametryczny i z użyciem punktów orientacyjnych.
Na potrzeby naszych testów lataliśmy w trybie fotogrametrycznym: należy wybrać obszar nalotu, pokrycie zdjęć, wysokość, prędkość oraz ustawienia kamery dla trybu autonomicznego, który wykonuje zdjęcia na obszarze nalotu zygzakiem. Aby przejąć kontrolę nad samolotem, należy przełączyć się na tryb ręczny. Możesz zmienić kąt kamery lotu za pomocą pilota. Aplikacja posiada również tryb priorytetu migawki, aby zachować spójność ekspozycji na wszystkich zdjęciach lotu, a także alarm wiatrowy w ekstremalnych warunkach.
Dla porównania, check lista WingtraOne jest połączona z dronem, tj. aplikacja do planowania nalotu WingtraPilot paruje się z dronem, aby dać użytkownikowi informację zwrotną o tym, na którym etapie procesu przygotowania lotu się znajdujesz. Etapy, które nie zostały wykonane, są podświetlone na liście w WingtraPilot. Po wykonaniu wszystkich kroków z listy, możesz rozpocząć nalot. Podczas pobierania map offline, możesz pobrać także dane wysokościowe i aktywować funkcję śledzenia terenu (Terrain Following) programu WingtraPilot na obszarach, gdzie wymagane jest mapowanie wzdłuż zbocza. Podsumowując, aplikacja jest intuicyjna – widzisz i wybierasz ustawienia, które mają zastosowanie do wybranego etapu przygotowania lotu.
Latanie dronem
WingtraOne startuje i ląduje pionowo tak jak Phantom 4 RTK, ale podczas lotu przechodzi w tryb płatowca. Pomarańczowa ikona drona przemieszcza się na ekranie WingtraPilot gdy dron leci zgodnie z zaplanowaną trasą. Wszystko dzieje się autonomicznie, od startu do lądowania. Jeśli wysokość lub kąty przejścia wymagają regulacji, wystarczy przełączyć się na tryb ręczny i z łatwością kontrolować lot za pomocą pilota. Jeśli obszar lądowania zostanie zablokowany przez pojazd lub inny sprzęt, lądowanie w trybie ręcznym jest bezpieczne i łatwe. Funkcja powrotu do domu aktywuje się automatycznie przy niskim poziomie baterii, ale można ją aktywować w dowolnym momencie podczas lotu.
Wielowirnikowiec RTK Phantom 4 manewruje płynnie podczas startu, lotu i lądowania. Po zaplanowaniu misji, lot jest autonomiczny, chyba że zdecydujesz się na sterowanie ręczne. Możesz w dowolnym momencie zmienić ręcznie położenie kamery. Możesz wybrać widok mapy i widok z kamery podczas lotu — jest to fajna funkcja, która działa w zasięgu 7 km.
Baterie i zasięg pomiaru
Inteligentna bateria lotu Phantom 4 RTK ma zarządzać poziomem naładowania w przypadku braku aktywności, ekstremalnych temperatur lub niezgodnego napięcia. Łatwo jest sprawdzić stan naładowania w locie i na ładowarce.
Certyfikowane inteligentne baterie litowo-jonowe systemu WingtraOne transmitują swój stan i poziom naładowania do WingtraPilot. Wingtra podaje maksymalny czas lotu wynoszący 55 minut, który był wielokrotnie testowany.
Na podstawie naszych lotów testujących zasięg na pełnej baterii, WingtraOne może pokryć prawie 14 razy większy obszar niż Phantom 4 RTK przy takim samym pikselu terenowym 1.2 cm/px. Podczas jednego lotu Phantom 4 RTK pokrył 8 ha, a WingtraOne 110 ha.
Zauważ, że w przypadku każdego drona zaobserwujesz skrócony czas lotu przy silnym wietrze i podczas lotu na wyższych wysokościach nad poziomem morza.
Opcje kamery
Phantom 4 RTK posiada wbudowaną kamerę: obiektyw 24 mm, matryca 1” CMOS, 20MP oraz mechaniczna migawka redukująca rozmycie.
Wingtra posiada trzy opcje kamer, stosowane pojedynczo, dla różnego rodzaju zastosowań—od mapowania 3D przy zmiennych wysokościach po wysoce dokładne mapy ewidencyjne. MicaSense RedEdge-MX oferuje najwyższej jakości zobrazowania multispektralne.
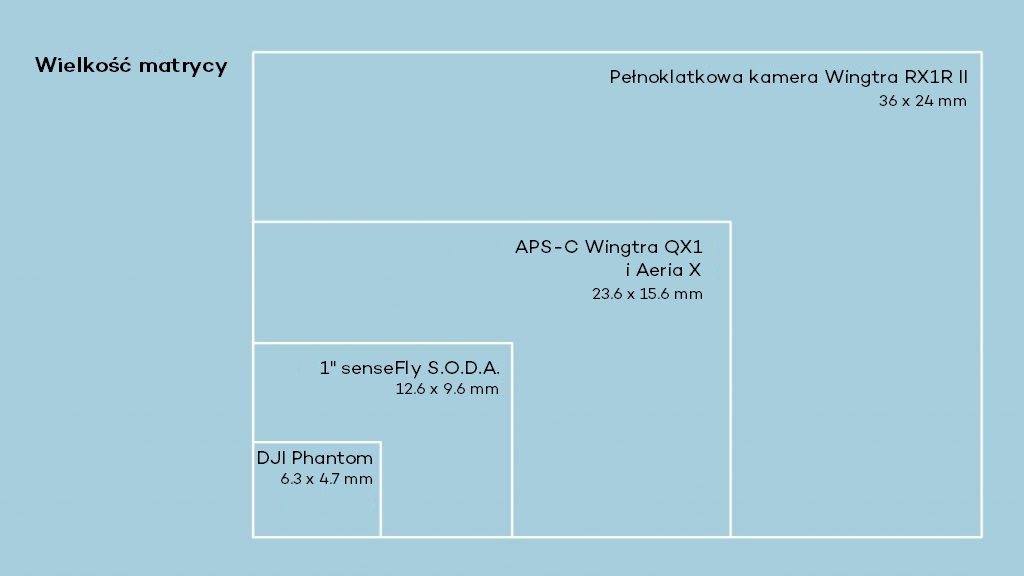
Jednak najbardziej wyjątkową opcją dostępną dla WingtraOne jest pełnoklatkowa kamera Sony RX1RII 42 MP. Wielkość matrycy tej kamery poprawia czułość na światło i redukuje szum na wynikowych obrazach. Rozdzielczość 42 MP kamery WingtraOne zapewnia nie tylko najlepszy piksel terenowy, ale także najlepszą dokładność bezwzględną zdjęć. Więcej na temat w kolejnym rozdziale.
PPK vs. RTK i dokładność
Phantom 4 RTK posiada odbiornik RTK z drugim modułem GNSS schowanym poniżej, aby poprawić stabilność sygnału w obszarach, w których sygnał może zostać utracony lub zablokowany. Jako dodatkowe akcesorium, DJI sprzedaje mobilną stację D-RTK 2, która jest kompatybilna z dronem i umożliwia zapis danych korekcyjnych z satelitów, które można wykorzystać później, podczas post-processingu (PPK).
Ważna uwaga —Phantom 4 RTK nie jest kompatybilny ze stacjami bazowymi innych producentów, tylko z DJI. Dane z obserwacji satelitarnych można zapisać w dronie, aby później przeprowadzić post-processing (PPK), ale według naszej wiedzy może to wiązać się z dodatkowymi ukrytymi kosztami.
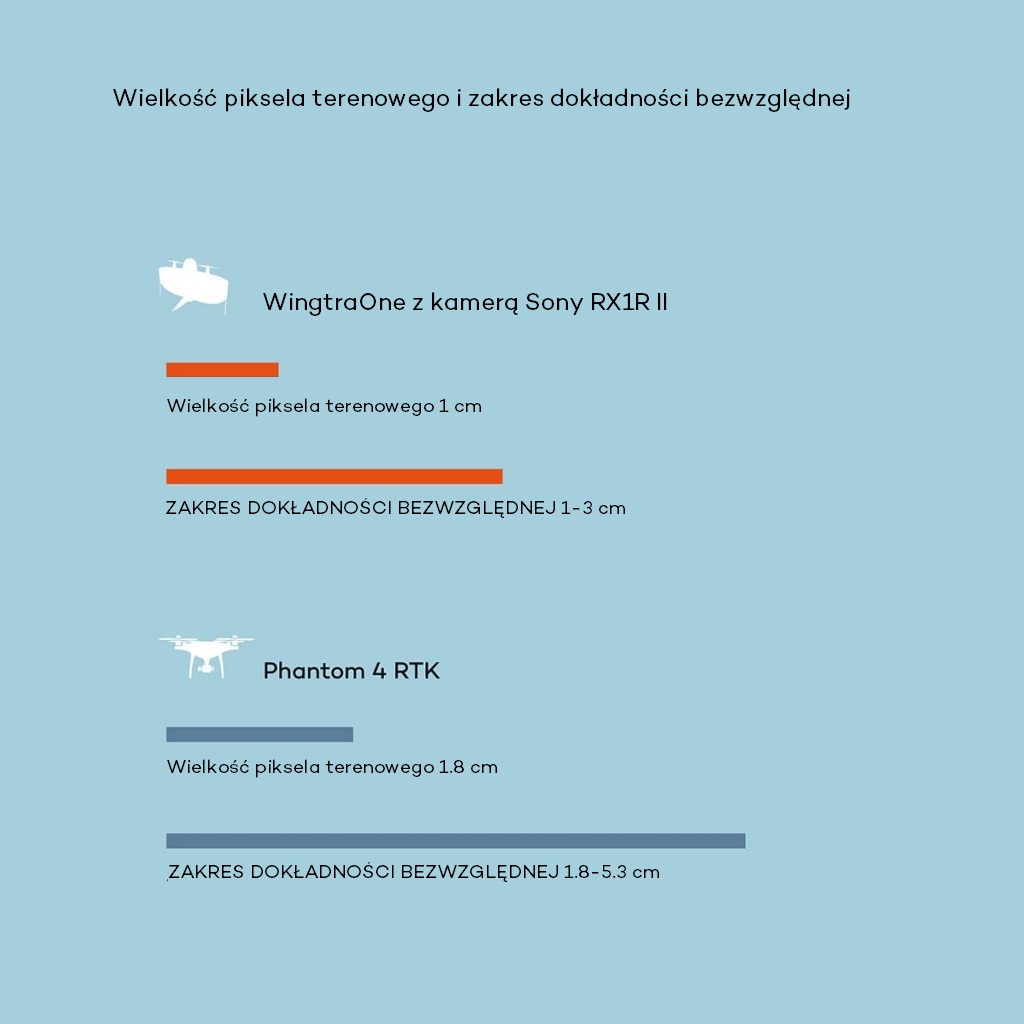
Podstawowa zasada mówi, że dokładność bezwzględna może być od 1 do 3 razy większa od wielkości piksela terenowego i zależy od jakości kamery i drona.
Phantom 4 RTK podaje wielkość piksela terenowego jako (H/36.5) cm/px, gdzie H to wysokość samolotu (w metrach) powyżej celu. Jego dokładność nie jest podana. Zamiast tego jest powiedziane, że dokładność zależy od oświetlenia, wzorów, wysokości drona i oprogramowania wykorzystywanego do przetwarzania obrazów. Podstawowa zasada mówi, że dokładność bezwzględna może być od 1 do 3 razy większa od wielkości piksela terenowego i zależy od jakości kamery i drona.
System WingtraOne posiada opcję PPK i jest kompatybilny z zewnętrznymi stacjami bazowymi. Udowodniono, że PPK jest najbardziej spójnym sposobem na uzyskanie wysokiej dokładności bezwzględnej lokalizacji z zaledwie trzema fotopunktami. W połączeniu z rozdzielczością 42 MP z pełnoklatkowej kamery Sony RX1R II, która oferuje lepszą czułość na światło, WingtraOne osiąga piksel terenowy wielkości 0.7 cm oraz dokładność bezwzględną równą 1 cm.
Post-processing
Korzystając zarówno z Phantom 4 RTK jak i WingtraOne, można wybrać dowolne oprogramowanie do przetwarzania zdjęć, np. Pix4D, 3DR Sitescan, Agisoft czy Propeller. Ponieważ inwestujesz we własny system, możesz wybrać program który najbardziej Ci odpowiada. A jeśli posiadasz już oprogramowanie do przetwarzania zdjęć, jesteś gotowy do pracy.
Obrazy testowe i jakość obrazu
Konfiguracja testu
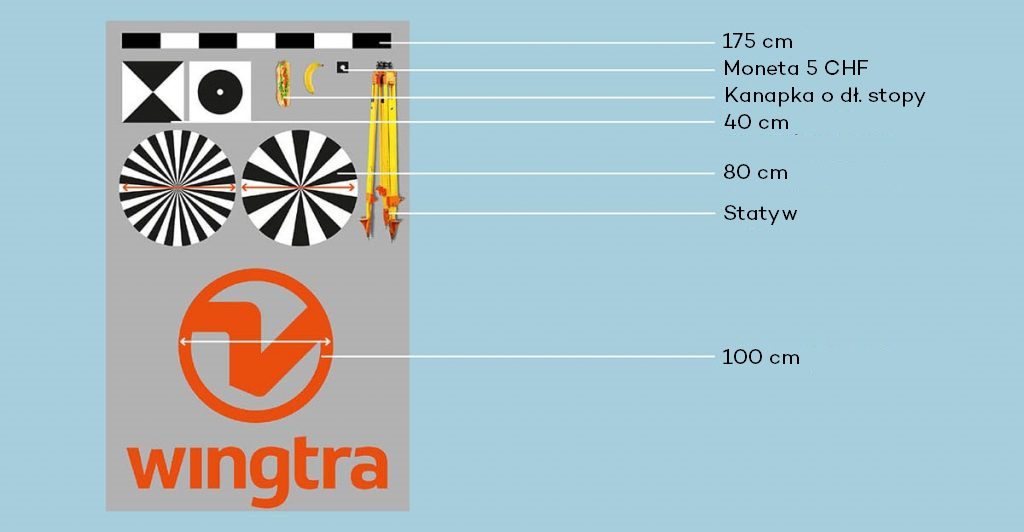
Jako obrazu testowego użyliśmy niestandardowego plakatu referencyjnego, który można pobrać tutaj. Gwiazdy Siemensa pozwalają nam obliczyć rzeczywistą rozdzielczość optyczną, którą następnie porównaliśmy z pikselem terenowym zgodnie ze specyfikacjami.
Wykonaliśmy naloty dwoma dronami, aby dokonać trzech porównań obrazów testowych na podstawie: najmniejszego możliwego piksela terenowego, tej samej wysokości oraz piksela terenowego tej samej wielkości.
Najlepszy możliwy piksel terenowy
Z naszego testu dla najmniejszego piksela terenowego wynika, że wbudowana kamera i ograniczona rozdzielczość stanowią wadę w porównaniu z dostępnymi kamerami dla WingtraOne. Phantom 4 RTK posiada jedną kamerę, która umożliwia osiągnięcie minimalnego piksela terenowego o wielkości 1.8 cm*. WingtraOne może posiadać różne kamery, a dzięki flagowej kamerze RX1R II osiąga piksel terenowy prawie o połowę mniejszy przy ponad 2-krotnie lepszej rozdzielczości optycznej.
Pełnoklatkowa kamera systemu WingtraOne o rozdzielczości 42MP pozwala bardzo dobrze odwzorować linie. Natomiast ograniczenia kamery Phantom 4 RTK ujawniają problemy z ekspozycją: prawie nie widać banana, kanapki ani monety, a reszta obrazu jest zazwyczaj rozmyta.
Wyniki te stają się jeszcze bardziej znaczące, gdy weźmiemy pod uwagę, że dokładność bezwzględna może być nawet trzy razy większa od piksela terenowego. Nie wspominając już o prawie 3-krotnie większym zasięgu WingtraOne w tej konfiguracji.
* Teoretycznie, Phantom 4 RTK byłby w stanie osiągnąć niższy piksel terenowym (GSD), jednak w miejscu, w którym przeprowadzaliśmy testy, środowisko nie pozwoliło nam latać poniżej 65 m, stąd „najlepszy piksel terenowy ” w tej sytuacji wynosi 1.8 cm.
WingtraOne + Sony RX1R II
Piksel terenowy (GSD): 0.8 cm
Wysokość: 65 m
Prawdziwa rozdzielczość: 0.9 cm
Pokrycie: 110 ha
Phantom 4 RTK
Piksel terenowy (GSD): 1.8 cm*
Wysokość: 65 m
Prawdziwa rozdzielczość: 2.4 cm
Pokrycie: 35 ha
Taka sama wysokość —110 m
Podczas lotu dronami na tej samej wysokości 110 m, Phantom 4 RTK osiągnął piksel terenowy o wielkości 3 cm, z rzeczywistą rozdzielczością 3.4 cm, podczas gdy kamera RX1R II systemu WingtraOne osiągnęła piksel terenowy o wielkości: 1.5 cm, z rzeczywistą rozdzielczością 1.5 cm.
Można także zauważyć wyraźne różnice w jakości kamery dla tej samej odległości od celu— prawdziwa rozdzielczość jest 2x lepsza dla kamery RX1R II.

WingtraOne + Sony RX1R II
Piksel terenowy (GSD): 1.5 cm
Prawdziwa rozdzielczość: 1.5 cm
Pokrycie: 190 ha

Phantom 4 RTK
Piksel terenowy (GSD): 3 cm
Prawdziwa rozdzielczość: 3.4 cm
Pokrycie: 60 ha
Piksel terenowy tej samej wielkości —1.8 cm/px
Aby porównać dane wyjściowe dla piksela terenowego tej samej wielkości (1.8 cm/px), wykonaliśmy nalot dronem Phantom 4 RTK na wysokości 65 m oraz WingtraOne RX1RII na wysokości 133 m.
Jak widać, nawet przy tej samej wielkości piksela terenowego, obrazy różnią się pod względem ilości szumów. Jednak największą różnicę w tym przypadku stanowi zasięg pomiaru – przy użyciu WingtraOne z 42MP kamerą RX1R II zasięg jest dużo, dużo większy – wynosi 230 ha, natomiast dla Phantom 4 RTK jest to 35 ha. W praktyce oznacza to, że wykonując nalot systemem WingtraOne z taką samą wielkość piksela terenowego równą 1.8 cm, jesteś w stanie ukończyć projekty 7 razy szybciej.
Widzimy również oczywistą różnicę w jakości kamery. Obraz z Phantom 4 RTK jest prześwietlony i wyblakły. Ma to wpływ na obliczoną rozdzielczość rzeczywistą, która całkowicie podważa wielkość piksela terenowego.

WingtraOne + Sony RX1R II
Wysokość: 133 m
Prawdziwa rozdzielczość: 2 cm
Pokrycie: 230 ha

Phantom 4 RTK
Wysokość: 65 m
Prawdziwa rozdzielczość: 2.4 cm
Pokrycie: 35 ha
Specyfikacja
| DJI Phantom 4 RTK | WingtraOne |
| Sprzęt | Sprzęt |
| Waga: 1.4 kg | Waga: 3.7 kg bez kamery + maksymalna waga kamery 800 g |
| Kamery: jedna z 20MP jedno-calowym sensorem, umożliwiającym wykonywanie zdjęć RGB i wideo | Kamery: RGB: Sony RX1RII 42 MP, pełnoklatkowa matryca; Sony QX1 20 MP, obiektyw 20 mm Voigtländer; Sony QX1 20 MP, obiektyw 15 mm, matryca APS-C; Multispektralne: Micasense RedEdge-MX /obiektyw 5.5 mm, 5 indywidualnych niestandardowych sensorów, multispektralna |
| Oprogramowanie | Oprogramowanie |
| Planowanie nalotu i nawigacja: Aplikacja DJI GS RTK, oferuje tryby lotu, planowanie misji, status naprawy sygnału RTK, widok kamery i mapy, szczegółowe odczyty mocy baterii, wykrywanie przeszkód | Planowanie nalotu i nawigacja: WingtraPilot, intuicyjny interfejs z elastycznymi opcjami planowania nalotu, moduł telemetryczny i oprogramowanie z bezpłatnymi aktualizacjami |
| Przetwarzanie zdjęć: | Przetwarzanie zdjęć: |
| W locie | W locie |
| Maksymalna prędkość*: 50 km/h (P-mode) *Zwykle lata się z mniejszą prędkością, np. 24 km/h | Prędkość przelotu: 58 km/h (A-mode) |
| Maks. dopuszczalna prędkość wiatru: zaleca się, aby nie obsługiwać systemu przy prędkości wiatru powyżej 35 km/h | Maks. dopuszczalna prędkość wiatru: do 45 km/h podczas lotu, do 30 km/h dla lądowania |
| Maksymalny czas nalotu: ok. 30 min | Maksymalny czas nalotu: 55 min |
| Automatyzacja: pełna automatyzacja z ręcznym przejęciem w dowolnym punkcie | Automatyzacja: pełna automatyzacja z opcją ręcznego przejęcia w dowolnym momencie |
| Wyniki | Wyniki |
| Opcja PPK/RTK: przetwarzanie RTK i PPK z dostępnym RTKLIB | Opcja PPK/RTK: PPK |
| Dokładność bezwzględna: nie podana | Dokładność bezwzględna: poniżej 1 cm GSD |
| Minimalny piksel terenowy: 2.74 cm GSD | Minimalny piksel terenowy: 0.7 cm |
| Podany zasięg: Około 100 ha dla pojedynczego nalotu (na wysokości 182 m), piksel terenowy w przybliżeniu wynosi 5 cm |
Zasięg dla wysokości 110m: 240 ha z pikselem terenowym o wielkości 1.5 cm
|
Dlaczego WingtraOne?
W porównaniu z DJI Phantom 4 RTK, system WingtraOne to ulepszenie, które pozwala obsługiwać znacznie większe projekty i zapewniać znacznie lepsze wyniki w zakresie obrazu i dokładności. Ze względu na to, że jest to większa inwestycja, jest to potężne rozwiązanie, które potrafi zmniejszyć czas potrzebny do ukończenia projektu z kilku dni do kilku godzin. Wingtra skupia się w dużej mierze na badaniach i rozwoju, aby utrzymać WingtraOne na czele profesjonalnych rozwiązań pomiarowych.
Dlaczego Phantom 4 RTK?
Jeśli masz bardzo ograniczony budżet i nigdy wcześniej nie pracowałeś z dronami, Phantom 4 RTK jest dobrym rozwiązaniem dla małych projektów, które nie wymagają wysokiej dokładności. Jest on potwierdzeniem na to, że drony naprawdę zmieniają sposób pracy i stanowią wygodne rozwiązanie dla wybranych zastosowań. Jednak jego ograniczenia staną się oczywiste, przy projektach wymagających dużego zasięgu oraz wyższej jakości obrazu i dokładności.
źródło: https://wingtra.com/best-drones-for-photogrammetry-wingtraone-comparison/phantom-4-rtk-vs-wingtra/
tłumaczenie: Anna Starz


