
Dzisiaj krótko, zwięźle i na temat. Zabraknie przydługiego wstępu, poetyckich porównań i nośnych anegdot. Same konkrety, czy – jak się teraz modnie mawia – “mięcho”.
Całkiem niedawno, przy okazji prezentacji Trimble SX10, jeden z naszych klientów zasugerował przeprowadzenie pewnego testu. Warto nadmienić, że ów klient posiada skaner laserowy jednej z popularniejszych w ostatnim czasie marek. Co to ma do rzeczy? Ano to, że – jak mawiała moja babcia – z niejednego pieca chleb jadł, jeżeli chodzi o skanowanie laserowe. Wie, z czym to się je. Wie, gdzie chyhają “pułapki”. Wie, w końcu, jak zagiąć handlowca, który próbuje mu wcisnąć kolejną bajkę na temat nowego, rewolucyjnego rozwiązania skanującego…
Po wstępnym zauroczeniu sposobem pracy SX-em (tutaj szerzej, jeśli jeszcze nie jesteś wtajemniczony) przyszła refleksja. Jest szybko, to fakt, ale jak dokładnie?
W oficjalnej specyfikacji Trimble SX10 próżno szukać miarodajnej informacji na ten temat (pokaż mi specyfikację jakiegokolwiek produktu na rynku, która podawałaby takie – miarodajne – informacje… 😉 ). Owszem, producent wspomina o szumie pomiaru odległości na poziomie 1.5mm, ale co to właściwie oznacza?
Dla naszego (przypominam – doświadczonego w temacie) klienta niewiele, więc zaproponował żeby to sprawdzić, porównując wysokościowo pomiar tachimetryczny do zeskanowanej chmury punktów.
Nasz zaprawiony w bojach handlowiec Maciej ochoczo zabrał się do pracy. Wykonał pomiar tachimetryczny z dwóch odległych o około 100 metrów stanowisk połączony ze skanowaniem. Dołożył jeszcze 3 wolne stanowiska skanowania i tym sposobem pozyskał dane do analizy.
Dzięki Trimble VISION (które w tym roku obchodzi swoje 10-te urodziny) możemy zobaczyć, jak sytuacja wyglądała w terenie:
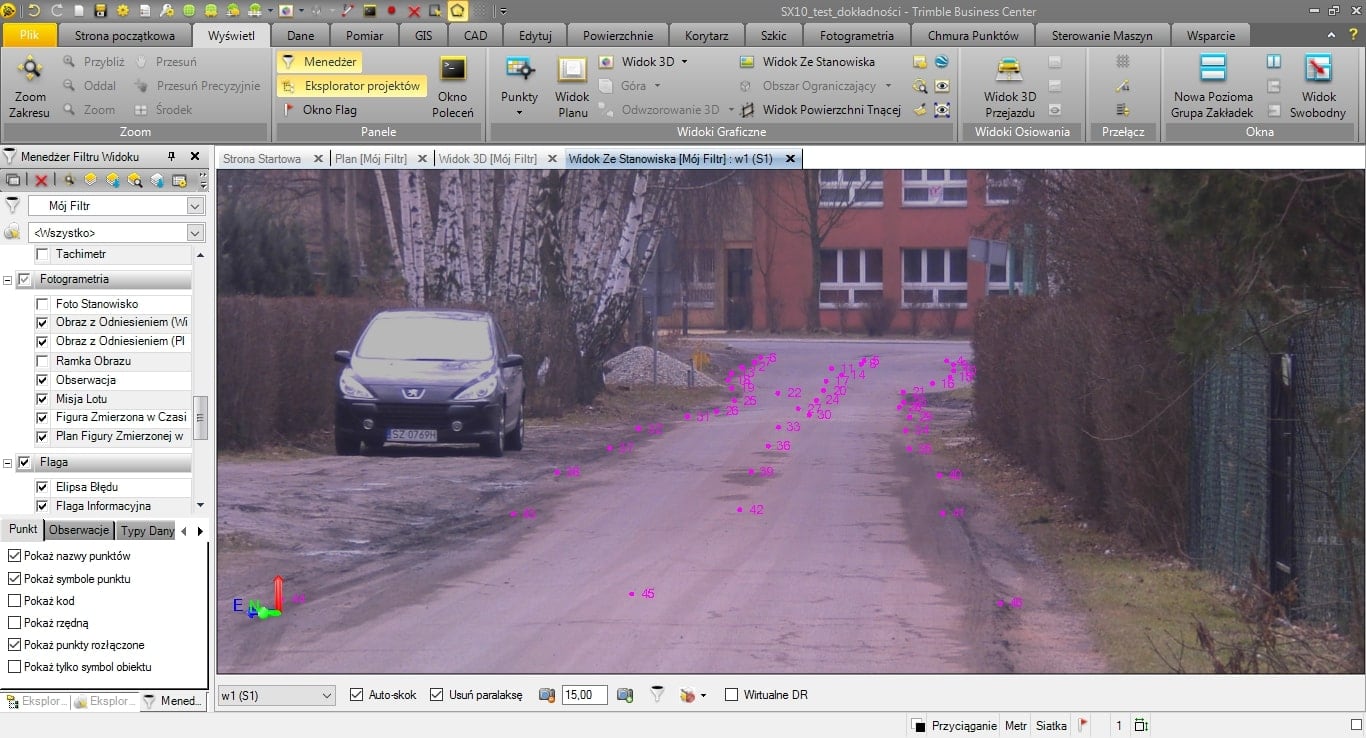
Widok ze stanowiska pierwszego
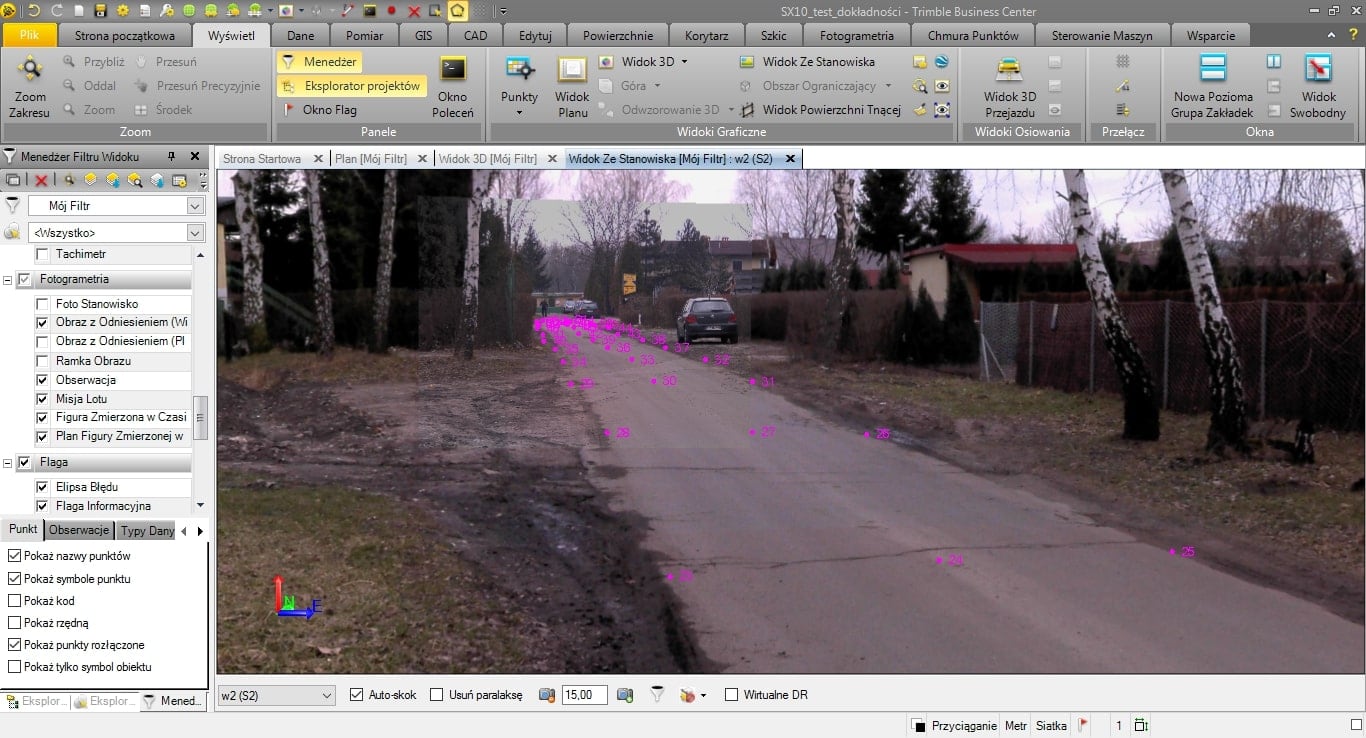
Widok ze stanowiska drugiego
W tym miejscu do akcji wkroczyłem ja wyposażony w Trimble Business Center. Metodyka, jaką przyjąłem była następująca:
- Wyczyściłem chmurę punktów z szumów pomiarowych (jak np. przejeżdżający samochód) i ograniczyłem jej zakres do obszaru, w którym wykonane były pomiary tachimetryczne
- Zbudowałem powierzchnię ze wszystkich punktów chmury
- Obliczyłem odległości interesujących mnie punktów do wspomnianej powierzchni
Tak wyglądały punkty pomierzone tachimetrycznie na tle oczyszczonej chmury punktów:
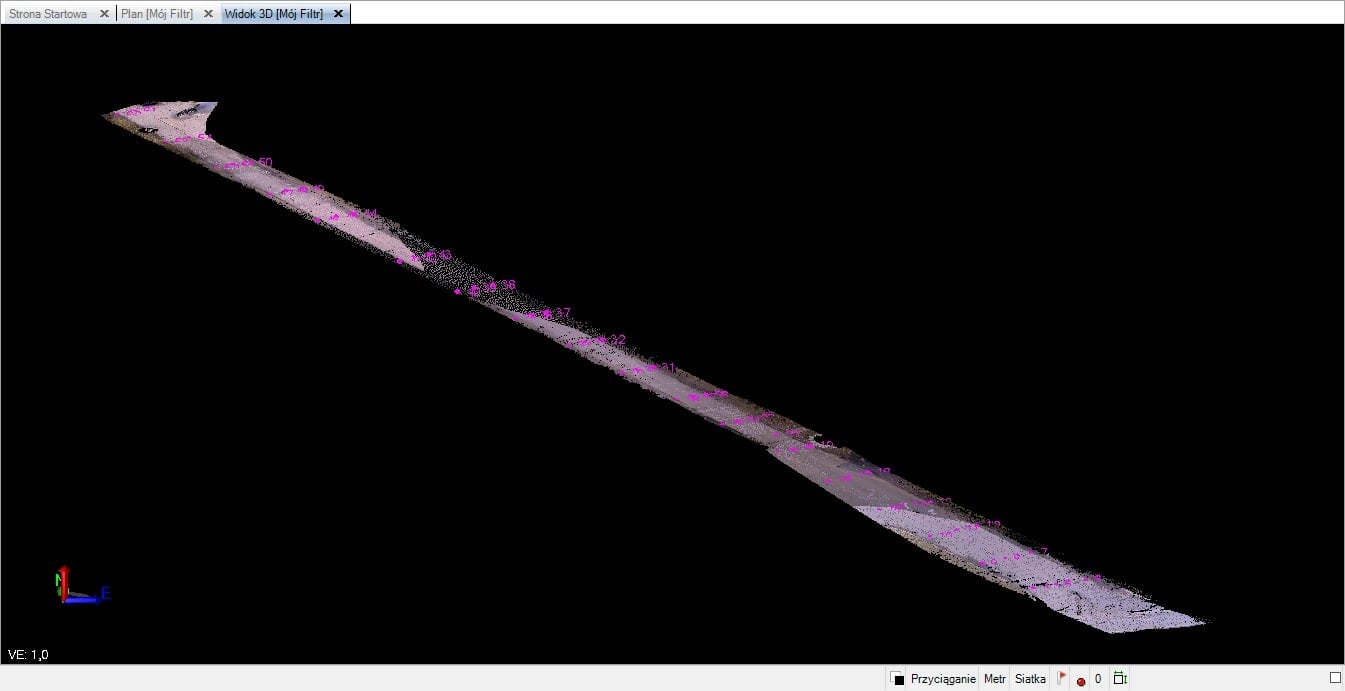
Punkty pomierzone tachimetrycznie
A tak przykładowy przekrój przez zbudowaną na bazie chmury płaszczyznę:

Widok przekroju drogi w punktach 46-44
Szczegółowy raport z pomiaru różnic wysokości znajdziesz tutaj: Wyniki pomiaru – punkty do powierzchni
Krótka analiza przedstawia się następująco:
W niemal 74% przypadków (39 z 53 analizowanych punktów) różnica pomiędzy punktem pomierzonym tachimetrycznie, a płaszczyzną zbudowaną z zeskanowanej chmury, nie przekracza 5mm. W przeszło 92% przypadków (49/52) błąd mieści się w granicy 10mm.
Chyba całkiem nieźle, co nie? 🙂
—
Wojciech Czechowski, Geotronics Dystrybucja.
Krrzysztof | 5 maja 2017
10 mm dokłądności? (można przyjąć, że przy 100% pomiaru)
5mm dokładności przy 74% – czy to dużo czy to mało?
Jeśli sprzęt wykorzystywany w zwykłej geodezji (mapy, podziały itp) to super, ale do zwykłej geodezji wystarczy sprzęt za 10 tyś. PLN (bo to trochę tak jak wydać krocie na Bugatti a potem snuć się z prędkością 50km/h – lekko mija się z celem)
Jeśli sprzęt wykorzystamy do geodezji inżynieryjnej (albo nawet przemysłowej) to już taka dokładność nie robi żadnego wrażenia. bo konstrukcje żelbetowe wykonuję się z dokładnością (wymagania zapisane w specyfikacjach) od 5-15mm, a w przypadku konstrukcji stalowych od 2, 3 do 5mm. i jak się ma do tego taka dokładność? (w tym przypadku możemy to porównać do posiadania Bugatti, którym jesteśmy zmuszeni jeździć z prędkością 50km/h bo z większą prędkością zgubimy podwozie na naszych drogach – czyli mamy skaner i fototachimetr, a musimy i tak mierzyć na lustro 🙁 )
Ciekaw jestem jak wypada dokładność X, Y ? a nie tylko sama wysokość (teoretycznie powinna wypaść lepiej, ale ciekawość niezaspokojona – jeszcze 😉 )
Wojciech Czechowski | 12 maja 2017
Panie Krzysztofie!
Na wstępie dziękuję za komentarz – takich aktywnych czytelników cenimy 🙂
Co do Pańskiego malowniczego porównania – nawet posiadając Bugatti są sytuacje, w których zmuszony jest Pan jechać 50 km/h (ot, choćby po mieście) i takie, w których można nieco bardziej poszaleć. Są też miejsca, w które Pan nie wjedzie tym samochodem…
Z Sx10 jest podobnie. Nikt nigdzie nie napisał, że w skanowaniu przemysłowym spisze się on równie dobrze, co skaner przemysłowy. Tak, jak Bugatti spisze się na bezdrożach gorzej, niż Jeep Wrangler…
Istnieją jednak sytuacje, w których sprawdzi się on znacznie lepiej, niż większość skanerów; ot choćby dzięki 600m zasięgu skanowania, czy kamerom, których nie sposób porównywać do tych obecnych w skanerach. To nie jest nawet inna liga. To już inny sport.
Nie mówiąc o tym, że tutaj ma Pan jednocześnie do dyspozycji 1-sekundowy tachimetr robotyczny posiadający najmniejszą plamkę lasera na rynku. W tym samym opakowaniu!
Co do Pańskiej ciekawości – nie sposób jej zaspokoić, dyskutując w internecie. Uważam, że najlepiej byłoby je rozwiać osobiście, na prezentacji SX’a. Co Pan na to? 🙂
Krzysztof | 11 maja 2017
i Znowu JA i moje pytania.
Szum pomiaru odległości na poziomie 1.5mm (czyli +/-1.5 mm = w zakresie 3mm ) ale jest to informacja dotycząca odległości a chmura jest w 3D. Gdzie informacja o szumie 3D?
co z kątem? co jaki kąt jest przeskok w skanowaniu? większość skanerów skanuje co 0.009 stopnia czyli (0 0′ 32″) a to na odległości 50m od skanowanego obiektu daje nam gęstość pkt co prawie 8mm i taki skok na skanowanej płaszczyźnie będzie tylko w punkcie pionowego padania wiązki lasera na płaszczyznę skanowaną, a im dalej tym gorzej.
można by uzyskać dokładniejszą chmurę punktów ze zdjęć fotogrametrycznych ale aparat 5Mpx nie pozwoli na nic lepszego 🙁
Wojciech Czechowski | 12 maja 2017
I znowu ja i moja odpowiedź 🙂
Technologia skanowania w SX’ie jest zupełnie inna, niż w tradycyjnym skanerze. Nie mamy tutaj jednej wiązki profilującej przesuwającej się o dany skok. Wiązek jest 16 i chmura jest dogęszczana przez wielokrotne przejścia, w razie potrzeby.
Na 50m odległości jesteśmy dzięki temu w stanie osiągnąć gęstość punktów na poziomie 6,25mm. Źle? 🙂
Co do 5Mpx – proszę pamiętać, że istotna jest tutaj ogniskowa. W celu sfotografowania, powiedzmy, fasady budynku z odległości 10 metrów wykonamy jedno zdjęcie telefonem o rozdzielczości 20MPx. Chcąc sfotografować tę samą fasadę z użyciem SX’a będziemy musieli wykonać około 10 zdjęć kamerą Primary (cały obrazek będzie miał już 10 x 5Mpx = 50Mpx). Kamera teleskopowa dałaby 500Mpx, ale tutaj byłaby to już sztuka, dla sztuki. Zresztą Access nie pozwala robić panoram kamerą teleskopową, bo trwałoby to wieczność i pożerało masę pamięci 🙂
Niemniej kamery w SXie mają zgoła odmienne zadanie (VISION!). Nie po to ma on funkcję skanowania, żeby chmurę tworzyć ze zdjęć 🙂
Tak czy inaczej – raz jeszcze podkreślam naszą gotowość do spotkania z Panem i podjęcia próby rozwiania wszelkich wątpliwości 🙂