
Przetwarzanie kodowe GNSS uległo znacznej poprawie w porównaniu z pierwszymi algorytmami precyzyjnych pomiarów satelitarnych. Zgodnie z bieżącymi postępami, nowy procesor obliczeniowy Trimble HD-GNSS zapewnia znacznie krótszy czas konwergencji oraz wysoką niezawodność wyznaczania pozycji, a także dużą dokładność, w porównaniu z wcześniejszymi silnikami obliczeniowymi, zwłaszcza w słabych warunkach dla pomiarów GNSS. Dodatkową korzyścią jest to, że Trimble HD-GNSS wymaga znacznie mniej filtrowania danych oraz mniejszej kontroli ze strony użytkownika podczas post-processingu. W niniejszym dokumencie opisano zalety silnika obliczeniowego Trimble HD-GNSS, jak również praktyczne zastosowanie pomiarów w czasie rzeczywistym w terenie oraz post-processingu w biurze.
Wprowadzenie
Globalne Systemy Nawigacji Satelitarnej (GNSS – ang. Global Navigation Satellite System) to wysoce wydajne systemy pomiarowe, mające wiele zastosowań. W odróżnieniu od klasycznych metod pomiarowych, odbiornik ruchomy GNSS nie jest ograniczony polem widzenia do sensora optycznego. Wraz z rozwojem sieci GNSS, bardzo rzadko zdarza się, aby geodeta musiał sam zakładać w terenie stację referencyjną. Jednak wykorzystywanie systemów GNSS do dokładnego pozycjonowania było wcześniej ograniczone do terenów z dobrą widocznością nieba. Korzystanie z GNSS w pobliżu drzew lub gęstej zabudowy było bardzo trudne, a czasem wręcz niemożliwe. Przez to geodeci powrócili do stosowania metod optycznych na terenach gdzie pole widzenia było szczególnie ograniczone.
Technologia śledzenia i przetwarzania sygnałów GNSS uległa znacznej poprawie w ostatnich latach. Co więcej, liczba dostępnych satelitów i sygnałów wzrosła i stale rośnie, dzięki wprowadzeniu nowych i zmodernizowanych konstelacji satelitarnych. Obecnie trzy konstelacje GNSS są w pełni sprawne (GPS, GLONASS i QZSS), a dwie są aktywnie wdrażane (COMPASS oraz Galileo). W rezultacie, geodeci mogą rozszerzyć zasięg pomiarów wykonywanych przy użyciu odbiorników ruchomych na obszary, które wcześniej były dla nich niedostępne. W tym dokumencie skupiono się na ulepszeniach silnika obliczeniowego GNSS, czyli tego elementu oprogramowania, który jest odpowiedzialny za obliczanie dokładnego położenia odbiornika ruchomego GNSS na podstawie obserwacji fazowych.
Obecnie systemy Trimble, zarówno te pracujące w czasie rzeczywistym (RTK) jak i te działające w trybie post-processingu, wykorzystują najnowszy i najbardziej zaawansowany silnik obliczeniowy: Trimble HD-GNSS. W porównaniu ze starszymi metodami obliczeniowym, Trimble HD-GNSS:
- Dostarcza bardziej wiarygodne informacje o położeniu na obszarach o słabych warunkach GNSS
- Skraca czas konwergencji
- Poprawia spójność precyzyjnego raportowania
W przypadku pomiarów w czasie rzeczywistym, użytkownicy zaobserwowali zmniejszony czas uruchamiania pomiaru GNSS oraz poprawę wiarygodności wyświetlanych dokładności RTK. W przypadku zastosowań wykorzystujących post-processing danych, użytkownicy mogą odczuć szybsze przetwarzanie z wykorzystaniem prostszych procedur, które zazwyczaj nie wymagają filtrowania surowych danych GNSS przed rozpoczęciem obliczeń.
Teoria przetwarzania GNSS
Pozycjonowanie odbiornika GNSS z centymetrową dokładnością za pomocą sygnału transmitowanego z satelitów, które orbitują około 20000 km ponad Ziemią z prędkością 14,000 kilometrów na godzinę jest nie lada wyzwaniem. Ale łatwo można zrozumieć podstawy teorii tej techniki. Jeśli wiemy gdzie znajdują się satelity oraz możemy zmierzyć w jakiej odległości od każdej z nich leży odbiornik, możemy obliczyć położenie odbiornika poprzez trilaterację (Rysunek 1).
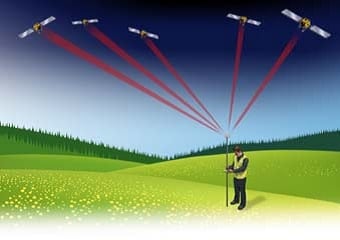
Rys. 1: Trilateracja zasięgów satelitów w celu oszacowania autonomicznego położenia odbiornika
Każdy satelita GNSS transmituje swoje położenie do odbiornika w formie efemerydy, która zawiera dane orbitalne i poprawki zegara każdego z satelitów. Zasięg od odbiornika do dowolnej satelity może zostać obliczony za pomocą przesłanego sygnału kodowego Pseudorandom Noise (PRN). Mimo to, z uwagi na wpływ atmosfery na propagację sygnału oraz niską dokładność transmitowanych efemeryd, położenie pojedynczego, niezależnego odbiornika może zostać oszacowane z dokładnością od 1 do 5 metrów. Aby przezwyciężyć źródła błędów oraz uzyskać dokładność pozycjonowania na poziomie kilku centymetrów, odbiornik GNSS będzie musiał podłączyć się do dodatkowego źródła, aby otrzymywać bardzo dokładne pozycje satelitów oraz poprawki zegara, jak również bardzo precyzyjne modele dla wszystkich efektów atmosferycznych. Wykorzystując transmitowane efemerydy, geodeta może uzyskać bardzo dokładne położenie, łącząc odbiornik ruchomy ze stacją referencyjną lub siecią Wirtualnych Stacji Referencyjnych (VRS).
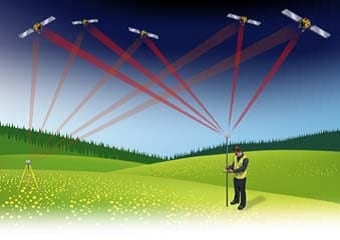
Rys. 2: Dokładne pozycjonowanie odbiornika ruchomego ze stacją referencyjną
Silnik obliczeniowy pomiarów różnicowych GNSS wykorzystuje połączenie danych z odbiornika ruchomego oraz odbiornika referencyjnego do zmniejszenia wpływu błędów orbity i atmosfery, ze względu na to, że błędy te są prawie identyczne w obu odbiornikach (Rysunek 2). Mechanizm przetwarzania wykorzystuje falę nośną każdego sygnału satelitarnego do pomiaru odległości od odbiornika ruchomego do satelity z milimetrową dokładnością. Jest to możliwe, ponieważ fala nośna ma znacznie mniejszą długość fali od sygnału kodowego PRN. Sygnał PRN posiada efektywną długość fali określoną długością kodu bitowego. Dla kodu C/A (ang. Coarse Acquisition) systemu Global Positioning System (GPS) długość ta wynosi 300 metrów. Długość fali nośnika dla kanału L1 GPS wynosi jedynie 19 centymetrów. Tak jak taśma pomiarowa z precyzyjną podziałką, fala nośna może być wykorzystana do pomiaru odległości do satelity.
Do dalszego omawiania problemu, można uznać sygnał fali nośnej za sinusoidę, tak jak pokazano na Rysunku 3. Pomiar fazy fali nośnej to różnica fazy sygnału odebranego oraz fazy odpowiednika sygnału generowanego przez oscylator lub zegar odbiornika. Faza zegara odbiornika, która zaczyna się od zera podczas włączenia, jest dowolna w stosunku do zegara satelity. W przypadku pierwszego pomiaru po zarejestrowaniu sygnału satelitarnego, tylko ułamkowa część fazy może być zmierzona.
Aktualny zasięg pomiędzy satelitą i anteną odbiornika ruchomego jest sumą tej części i nieznanej liczby pełnych długości fali. Nieznana liczba początkowa pełnych cykli fazowych sygnału jest nazywana “nieoznaczonością fazy”.
Aby dokładnie zmierzyć odległość, mechanizm przetwarzania musi wyznaczyć tę nieoznaczoność.
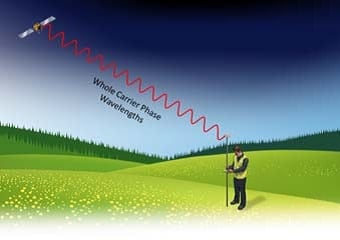
Rys. 3: Nieoznaczoność fazy to nieznana początkowa liczba pełnych cykli fazowych sygnału pomiędzy odbiornikiem ruchomym i każdym satelitą
Tradycyjne metody przetwarzania GNSS wykorzystywały połączenie danych referencyjnych z danymi z odbiornika ruchomego w celu ustalenia stałej liczby (“fix”) pełnych cykli fazowych sygnału pomiędzy odbiornikiem i satelitami. Proces ten zazwyczaj odbywał się w dwóch oddzielnych etapach:
- Generowano rozwiązanie typu “float” za pomocą kodu PRN oraz obserwacji fali nośnej.
- Przeprowadzano poszukiwanie w celu wyznaczenia nieoznaczoności fazy.
Pomyślnie zakończony proces wyszukiwania pozwalał uzyskać rozwiązanie typu “fixed”.
Początkowo na dokładność rozwiązań typu “float” miały wpływ szumy kodu PRN, przez co rozwiązania te były dość słabe. Typowe dokładności rozwiązań typu “float” wynosiły kilka decymetrów i miały niewielką wartość dla większości zastosowań geodezyjnych.. Rozwiązania “float” były często utrzymywane przez dłuższy okres czasu podczas pracy w trudnych warunkach lub na długich liniach bazowych, po czym następowało chwilowe przejścia na rozwiązanie „fixed”. W ten sposób konwergencja z rozwiązania typu “float” na “fixed była bardzo spolaryzowana.
Podejście float/fixed do wyznaczenia nieoznaczoności fazy miało wiele wad. Jedną z nich było to, że użytkownik nie mógł uzyskać informacji o położeniu dopóki odbiornik nie uzyskał rozwązania fixed. Co więcej, istniało także prawdopodobieństwo otrzymania niepoprawnego rozwiązania, gdy podczas przetwarzania wybrany został zły zestaw nieoznaczoności fazy. W takim przypadku, poprawny zestaw był odrzucany i nie mógł zostać wybrany do momentu powtórzenia wyszukiwania. W odniesieniu do pomiarów RTK, oznaczało to, że wyniki mocno odstające były raportowane z nierealnie dobrą dokładnością przez wiele sekund, do momentu wykrycia przez automatyczną kontrolę integralności.
Opisane powyżej sytuacje zostały przedstawione na Rysunku 4, gdzie dokładności oznaczono wielkościami elips.
Trimble HD-GNSS stanowi przełom w wyznaczaniu nieoznaczoności fazy, które jest możliwe dzięki kilku czynnikom:
- Ulepszono wiele elementów konstrukcyjnych odbiornika GNSS od momentu opracowania pierwszych algorytmów obliczeniowych. Odbiorniki rozwinęły się przede wszystkim dzięki zwiększonej dostępności satelitów i sygnałów. Pierwotne odbiorniki pomiarowe GPS mogły śledzić tylko dwie częstotliwości nośne: GPS L1 oraz L2. Najnowszy odbiornik Trimble R10, dzięki 440 kanałom odbiorczym, może śledzić 16 fal nośnych GNSS, które zostały wymienione w Tabeli 1
- Nowoczesne anteny i odbiorniki GNSS znacznie lepiej radzą sobie z łagodzeniem wielodrożnych sygnałów. Po cyfrowym próbkowaniu sygnału, błędy wielotorowości są następnie redukowane przez techniki przetwarzania oprogramowania.
- Dostępność zwiększonej mocy obliczeniowej ułatwia korzystanie z bardziej zaawansowanych algorytmów śledzenia sygnału GNSS oraz technik przetwarzania RTK. Odbiornik GNSS Trimble R10 opiera się na najnowocześniejszej technologii Trimble Maxwell-6 do przetwarzania sygnału. Obliczenia RTK są wykonywane w R10 za pomocą mikroprocesora, który jest o rząd wielkości bardziej wydajny i energooszczędny niż jego poprzednicy. W przypadku post-processingu danych GNSS, przeciętny komputer stacjonarny zazwyczaj zawiera wielordzeniowy mikroprocesor o wysokiej mocy.
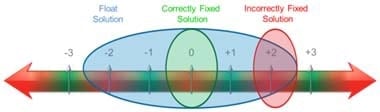
Rys.4: W trudnych warunkach obserwacyjnych, procesor GNSS był podatny na niedokładne rozwiązania „float” oraz niepoprawne rozwiązania „fixed” dla nieoznaczoności fazy
Wszystkie te udoskonalenia doprowadziły do rozwoju znacznie bardziej wytrzymałej metody przetwarzania GNSS.
Aby w pełni wykorzystać istniejące konstelacje GNSS oraz technologię Trimble Maxwell, zarówno odbiornik Trimble R10 jak i oprogramowanie biurowe Trimble Business Center (TBC) zawierają teraz mechanizm obliczeniowy Trimble HD-GNSS. Technologia Trimble HD-GNSS oferuje nowe podejście do wyznaczania nieoznaczoności fazy, które różni się od tradycyjnych rozwiązań fixed/float.
Rozwiązanie nieoznaczoności fazy obecnie występuje jako szybka konwergencja do dokładnego rozwiązania, z bardziej realistycznymi dokładnościami w raportach. Nie ma już nieciągłości, która występowała w przypadku przejścia z „float” na „fixed”. Tym samym, użytkownicy nie muszę już martwić się o rozwiązania “fixed” oraz “float” i mogą się skupić na osiąganiu założonych dokładności. Konwergencja rozwiązania położenia jest bardzo szybka w normalnych warunkach śledzenia. Jest to widoczne tylko na dłuższych liniach bazowych lub w trudnym środowisku obserwacyjnym, np. pod koronami drzew. Ale nawet w tak wymagających warunkach, dobre rozwiązania są możliwe do osiągnięcia podczas konwergencji, w odróżnieniu od tradycyjnych rozwiązań „float”. Trimble HD-GNSS jest również znacznie mniej podatny na nieprzewidywalne zachowania w przypadku wystąpienia błędów systematycznych, jakim jest np. wielotorowość, która pogorsza dokładność, co można uznać za normalne i możliwe do przewidzenia.
Mając wieloczęstotliwościowe dane z co najmniej pięciu tych samych satelitów w odbiorniku bazowym oraz ruchomym, procesor Trimble HD-GNSS może wyznaczyć całkowitą liczbę pełnych cykli fazowych. Kolejne pomiary na punkcie RTK pozwalają na zapis z centymetrową dokładnością, dysponując danymi jedynie z dwóch epok pomiarowych. W celu uwzględnienia nowych satelitów oraz tymczasowych przerw w śledzeniu sygnału, silnik obliczeniowy rozwiązuje nieoznaczoność jako proces ciągły. W trudnych warunkach obserwacyjnych, tradycyjne mechanizmy przetwarzania powróciłyby do rozwiązania „float”, a otrzymane w rezultacie wyniki byłyby nie do zaakceptowania. Dla porównania, Trimble HD-GNSS nieprzerwanie dostarcza najlepsze możliwe pozycjonowanie z wiarygodną oceną dokładności, która jest współmierna z warunkami środowiska i widocznością satelitów. Dzięki temu, dostępność użytecznych pozycji w trudnych środowiskach obserwacyjnych znacząco wzrasta.
Rysunek 5 przedstawia błąd położenia w czasie dla rozwiązania Trimble HD-GNSS w porównaniu z tradycyjnym rozwiązaniem „float/fixed”. Wcześniej, zmiana z “float” na “fixed” następowała po czasie konwergencji float, gdy błędy rozwiązania typu „float” wciąż były duże. Obecnie, dzięki Trimble HD-GNSS, konwergencja następuje bardzo szybko i można osiągać dokładności na poziomie rozwiązania „fixed” kilka sekund wcześniej niż w przypadku poprzednich silników obliczeniowych. Rysunek pokazuje także, że wcześniejsza metoda była podatna na generowanie nieprawidłowych rozwiązań “fixed” z dużym błędem położenia. W takich przypadkach, użytkownikowi podawane były błędne dopuszczalne wartości dokładności. W przeciwieństwie do Trimble HD-GNSS, który podaje bardziej wiarygodne wartości dokładności w trakcie procesu konwergencji.
Zastosowanie pomiarów w czasie rzeczywistym
Przetwarzanie Trimble HD-GNSS jest dostępne dla pomiarów GNSS w czasie rzeczywistym przy użyciu odbiornika Trimble R10 (Rysunek 5) oraz oprogramowania terenowego Trimble Access™. Użytkownicy mogą zauważyć, że pomiar RTK jest bardzo szybko inicjowany. Systemy wykorzystywały termin “inicjalizacja” do opisywania przejścia z rozwiązania „float” na „fixed” w tradycyjny sposób. Teraz “inicjalizacja” jest definiowana bardziej ogólnie jako proces rozpoczynania/uruchamiania pomiaru RTK poprzez podłączenie do danych referencyjnych lub serwera VRS, po czym następuje szybka zbieżność do rozwiązania o centymetrowej dokładności.
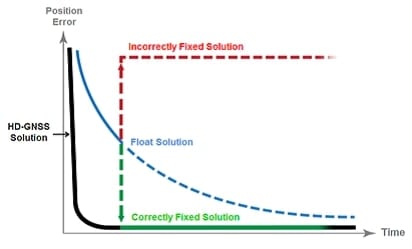
Rys.5: Mechanizm obliczeniowy Trimble HD-GNSS w szybki sposób wyznacza nieoznaczoność fazy, co pozwala na uzyskanie dokładności na poziomie „fixed”
Wraz z powstaniem w odbiorniku nowego mechanizmu obliczeniowego Trimble HD-GNSS, oprogramowanie terenowe Trimble Access nie wyświetla już terminów “fixed” i “float” podczas pomiaru przy użyciu odbiornika Trimble R10.
Podczas rozpoczynania procesu konwergencji, na ekranie pojawia się bardziej ogólny termin „RTK”, gdy tylko zostaną osiągnięte odpowiednie dokładności, co zostało pokazane na Rysunku 7. W warunkach sprzyjających pomiarom GNSS, centymetrowe dokładności można osiągnąć w ciągu kilku sekund od rozpoczęcia pomiaru, spełniając tym samym założone dla punktów pomiarowych progi dokładnościowe.
Po zainicjowaniu odbiornika Trimble R10, możliwa jest rejestracja pomiarów na żądanie na poziomie dokładności wyświetlanej na ekranie. Umożliwia to działanie systemu w trudnych warunkach, np. w gęstej zabudowie, gdzie wiele satelitów jest zasłoniętych. Ponieważ najdokładniejsze wyniki można uzyskać na terenach otwartych, użytkownik może bez obaw kontynuować pomiar na przysłoniętym obszarze tak długo, jak tylko dokładność wyświetlana na ekranie będzie zadowalająca dla danego zastosowania. Trimble Access wyświetli zielony znaczek, potwierdzający, że uzyskana dokładność mieści się w przedziale wartości zdefiniowanym przez użytkownika, tak jak pokazano na Rysunku 6
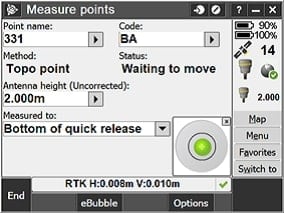
Rys. 6: Trimble Access wyświetla “RTK” podczas inicjowania odbiornika Trimble R10 (Należy zwrócić uwagę na libellę elektroniczną programu Trimble Access – eBubble, która wskazuje czy instrument jest spoziomowany.)
Trimble HD-GNSS umożliwia użytkownikom pomiar punktów topograficznych w trybie “stop and go”. Odbiornik Trimble R10 musi być zainicjowany jedynie w dwóch epokach pomiarowych. W połączeniu z wykorzystaniem funkcji eBubble w Trimble Access do automatycznej rejestracji pomiarów punktów, gdy odbiornik ruchomy jest trzymany nieruchomo i pionowo (zobacz Rysunek 7), skrócony czas pomiaru stop-and-go znacząco zwiększa wydajność.
Wartości dokładności RTK cały czas będą odzwierciedlać podstawowe pojęcia takie jak widoczność satelitów, geometrię satelitów (PDOP) oraz długość linii bazowej. Użytkownicy mogą zoptymalizować dokładność, ograniczając odległość od stacji bazowej RTK lub wykorzystując sieć VRS. Zaleca się, aby nadal stosować dobre praktyki pomiarowe, szczególnie w trudnych dla obserwacji GNSS warunkach, w których użytkownicy powinni w wybrany przez siebie sposób kontrolować pomiar, np. wykonując ponowny pomiar na punktach oraz nawiązując się na znane punkty.
Zakładając punkty osnowy pomiarowej, Trimble zaleca, aby każdy punkt był mierzony przez 3 minuty oraz aby następnie, po upływie co najmniej 2 godzin z zupełnie inną konstelacją satelitów, zmierzyć ten punkt przez kolejne 3 minuty.
Zwiększony czas pomiaru zwiększa pewność pojedynczego pomiaru.
Wielokrotne pomiary tego samego punktu zapewniają niezależną kontrolę wewnętrznej oraz zewnętrznej dokładności sieci pomiarowej. Aby otrzymać bardzo dokładne wyniki, użytkownicy mogą wybrać pomiar i post-processing surowych danych GNSS.
Zastosowanie pomiarów w trybie post-processingu
Pomiary GNSS w trybie post-processingu pozostają jedną z najdokładniejszych i dającą najwięcej możliwości dostępną techniką zakładania osnowy pomiarowej. Nic dziwnego, w końcu taka forma pomiarów GNSS, w odróżnieniu od optycznych technik pomiarowych, nie wymaga od geodety widoczności między mierzonymi punktami. Nawet w przypadku pomiarów topograficznych, post-processing jest bardziej korzystny niż RTK, ponieważ pozwala użytkownikowi na pomiar, bez konieczności korzystania z danych radiowych czy mobilnego połączenia internetowego.
Na Rysunku 7 pokazano, że podczas zakładania osnowy, post-processing pozwala użytkownikowi tworzyć połączone sieci stanowisk, które są bardzo zasłonięte, zarówno między sobą jak i w stosunku do punktów odniesienia. Osnowa o wysokiej dokładności może znacznie poprawić wydajność kolejnych działań. Na przykład, zespół pomiarowy może śmiało nawiązywać się na stanowiska sieci podczas tyczenia, bez obawy o wystąpienie błędów wynikających z niedokładnej osnowy.
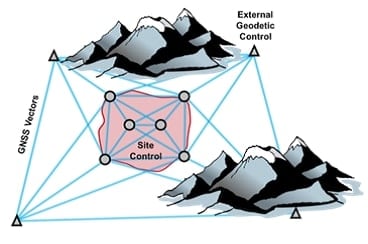
Rys. 7: Pomiar GNSS w trybie post-processingu GNSS jest wykorzystywany do utworzenia połączonej sieci GNSS z zasłoniętym polem widzenia
Niestety wiele osób unika pomiarów z post-processingiem, ponieważ uważa je za skomplikowane i podatne na błędy. Aplikacja Trimble do post-processingu danych GNSS, Trimble Business Center (TBC), wykorzystuje algorytmy obliczeniowe Trimble HD-GNSS w celu zwiększenia wydajności i ograniczenia poziomu złożoności. W TBC można osiągnąć doskonałe wyniki bez konieczności ręcznego edytowania danych GNSS czy zmiany domyślnych ustawień procesora.
Oparte na Trimble HD-GNSS mechanizmy obliczeniowe oprogramowania TBC wykorzystują te same przełomowe techniki przetwarzania danych co odbiornik Trimble R10 do edycji oraz filtrowania danych, a także wyznaczania nieoznaczoności fazy i szacowania dokładności. Wyświetlane dokładności poziome i pionowe są wiarygodne, bez względu na warunki pomiaru i powinny być wykorzystywane jako podstawowe kryterium oceny wyników przetwarzania.
Rysunek 8 przedstawia wyniki przetwarzania typowej linii bazowej w TBC. Oprogramowanie nadal wskazuje rozwiązania linii bazowej jako “Fixed” lub “Float” , ale określenia te mają już inne znaczenie niż w tradycyjnym podejściu. Są one przeznaczone do klasyfikowania dokładności rozwiązań linii bazowych względem wcześniejszych rozwiązań zgrubnych (”float”) i precyzyjnych („fixed”). Wiele osób potrzebuje takiej klasyfikacji, aby spełnić wymagania dotyczące raportowania projektu.
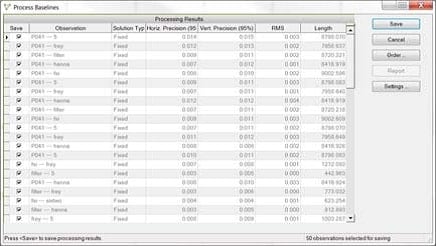
Rys. 8: Przetworzone linie bazowe GNSS w oprogramowaniu Trimble Business Center
TBC automatycznie określa najlepsze podejście w odniesieniu do opóźnień i przyspieszeń sygnału spowodowanych przejściem przez atmosferę ziemską. W przypadku bardzo krótkich linii bazowych, opóźnienia te są wspólne dla odbiornika bazowego i ruchomego, i dlatego są eliminowane podczas przetwarzania pomiarów fazy fali nośnej. Dla długich linii bazowych opóźnienia nie są wspólne i przez to muszą być modelowane lub eliminowane w inny sposób
Przy pomiarach fazowych dwu- lub trzyczęstotliwościowych, odchylenia jonosferyczne mogą w prosty sposób zostać zminimalizowane na długich liniach bazowych, przetwarzając kombinacje fazy fali nośnej wolnej od wpływu jonosfery. Jednak, o ile taka kombinacja minimalizuje wpływy jonosferyczne, nie jest ona optymalna ze względu na zwiększone szumy. Z związku z tym, Trimble HD-GNSS automatycznie określa optymalną kombinację fazy fali nośnej, której należy użyć dla dowolnej trajektorii kinematycznej lub statycznej linii bazowej. Kombinacja polega na tym, że dla krótkich linii bazowych zmierza do kombinacji wąskopasmowej (faza fali nośnej o najniższym poziomie szumu); dla bardzo długich linii bazowych zmierza do kombinacji wolnej od wpływu jonosfery (faza fali nośnej o najwyższym poziomie szumu, ale bez odchyleń).
Silnik obliczeniowy stosuje model empiryczny opóźnienia troposferycznego do opóźnień sygnału wynikających z przejścia przez troposferę. Dla wszystkich sesji kinematycznych oraz sesji statycznych trwających mniej niż 1 godzinę, opóźnienia troposferyczne są obliczane za pomocą modelu Hopfielda. Dla sesji statycznych trwających więcej niż godzinę, dla linii bazowych dłuższych niż 2 km, opóźnienia troposferyczne są obliczane za pomocą modelu Hopfielda i funkcji Niella. Dodatkowo, TBC może opcjonalnie ulepszyć model opóźnienia troposferycznego poprzez oszacowanie poprawek za pomocą pomiaru fazy fali nośnej. Takie połączenie, modeli z poprawkami , niezmiennie daje najlepsze wyniki i nie wymaga wprowadzania danych przez użytkownika TBC.
Rozwiązania dla linii bazowych o długości powyżej 20 kilometrów mogą zostać ulepszone dzięki wykorzystaniu do obliczeń precyzyjnych efemeryd satelitów. W starszych programach, pobieranie i importowanie plików precyzyjnych efemeryd było czasochłonne i skomplikowane. Dzięki funkcji Internet Download programu TBC, użytkownik może mieć dostęp do tych plików po zaledwie kilku prostych kliknięciach. Z uwagi na łatwość wykorzystywania efemeryd precyzyjnych w nowoczesnym oprogramowaniu, użytkownicy powinni brać je pod uwagę podczas wszystkich obliczeń. Funkcja Internet Download może być także wykorzystywana do odbierania surowych danych ze stacji referencyjnych ze wszystkich sieci GNSS na całym świecie.
Wyrównywanie sieci wektorów przetworzonych w TBC za pomocą Trimble HD-GNSS jest teraz prostsze niż kiedykolwiek przedtem. Ze względu na ulepszone szacunki dokładności silnika obliczeniowego, wagi dla każdej obserwacji w sieci są bardziej wiarygodne. Gdy użytkownik wyrównuje sieć, porównanie zakładanego błędu z realnym błędem wektorów wynikającym z wyrównania jest współczynnikiem odniesienia sieci bliskim 1.00. Eliminuje to dodatkowy etap dostosowywania zbyt optymistycznych wartości błędów, które były powszechne przy korzystaniu ze starszych narzędzi obliczeniowych.
Rys. 9: Ukończona sieć GNSS w Trimble Business Center

Rys. 10: Wyrównanie sieci metodą najmniejszych kwadratów w programie Trimble Business Center zazwyczaj pozwala uzyskać współczynnik o wartości bliskiej 1.00 dla wektorów przetworzonych za pomocą Trimble HD-GNSS
Podsumowanie
Postępy w przetwarzaniu GNSS, dostępność dodatkowych satelitów i sygnałów, a także ulepszone śledzenie sygnału przyczyniły się do zwiększenia zasięgu pomiarów GNSS, umożliwiając pomiar także na trudnych, przesłoniętych obszarach. Nowa technologia zmniejszyła także złożoność stosowania GNSS, zarówno technologii pomiaru w czasie rzeczywistym jak i w trybie post-processingu, umożliwiając geodetom pewne i precyzyjne pozycjonowanie punktów w niemal każdych warunkach zewnętrznych.
Pomyślny pomiar GNSS tradycyjnie wymagał długim szkoleniami w zakresie oprogramowania, ze względu na skomplikowane interfejsy, które były podatne na błędy użytkowników. Obecnie, z nowym silnikiem obliczeniowym Trimble HD-GNSS w odbiorniku Trimble R10 oraz oprogramowaniem biurowym Trimble Business Center, użytkownik może obejść te wszystkie skomplikowane procedury i skupić się na wynikowych dokładnościach.
Oprócz wymienionych już korzyści, jakie przynosi użytkownikowi nowa metoda przetwarzania danych, umożliwia ona także ciągłe ulepszanie produktów firmy Trimble wraz z rozwojem konstelacji GNSS. Trimble HD-GNSS został zaprojektowany w taki sposób, aby można było go zmieniać poprzez oprogramowanie wbudowane oraz aktualizacje programów. Dzięki temu, może on korzystać z dodatkowych satelitów oraz sygnałów GNSS i tym samym poprawić jakość pomiarów w coraz bardziej wymagających warunkach terenowych. Pomiary GNSS są niewątpliwie jedną z najbardziej rozwijających się technologii pomiarowych, która przyniesie korzyści użytkownikom Trimble pod względem coraz większej dokładności oraz produktywności.
[źródło: Trimble Survey Division, wrzesień 2012]


